世界上一些科學家致力于讓機器人擁有更強的行走能力,而另一些則從另外的角度出發(fā),探索機器人行進的新方式。
以色列班古里昂大學 單馬達波動機器人
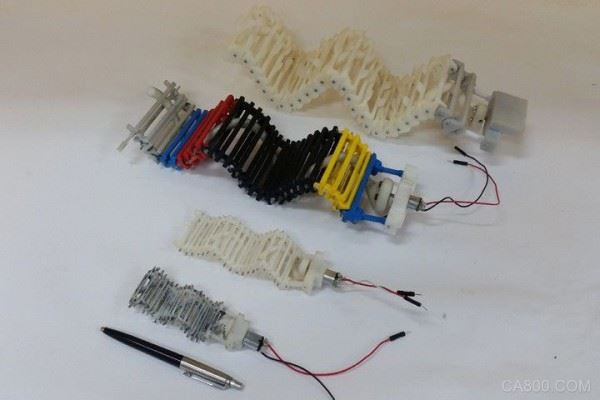
以色列班古里昂大學的研究人員屬于后一種。他們制造的單馬達波動機器人(Single-Actuator Wave robot,簡稱 SAW 機器人) 前進時的動態(tài)就像水面的波紋。
據(jù)領導該項目的 David Zarouk 博士介紹:實驗證明了波浪狀蠕動非常適合讓機器人在砂石等堅硬的表面移動。低重心的特點讓他們的機器人有能力克服許多障礙。這種機器人所具有的游泳能力使得它應用前景廣闊。
SAW 機器人波浪形的動作與蛇很像(盡管蛇的動作是水平面上的),也與依靠鞭毛前進的海洋生物有著諸多的相似之處。從名字上我們就知道,SAW 機器人只有一個馬達驅動脊柱狀的螺旋結構,整個構造是用3D打印的方式制作的。
SAW 機器人最讓 Zarouk 博士感到興奮的一點是它的尺寸非常多樣。最小的 SAW 可以做到 1 厘米長,Zarouk 希望這種尺寸的SAW機器人可以幫助醫(yī)生進行內窺鏡檢查,甚至是活體組織檢查。
日本京都大學 多腿機器人
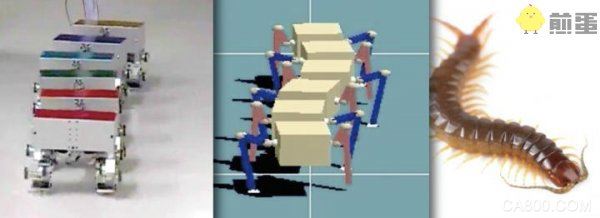
我們之所以會害怕蜈蚣,是因為我們對蜈蚣移動的敏捷性和跨越障礙的靈巧性了解不夠。日本京都大學的研究人員們并未被蜈蚣嚇到,他們已經對這個問題有了透徹的了解。他們利用電腦模擬和機器人找到了問題的答案。
這些研究人員深入了解的,是運動力學本身的特性,即馴化不穩(wěn)定性,這個也許是劣勢的因素正是蜈蚣成功的關鍵要素。
研究的主要科學家Shinya Aoi表示:“我們的團隊研發(fā)出一種蜈蚣數(shù)學模型,發(fā)現(xiàn)蜈蚣在直走時會通過改變它們的移動速度和機體軸線的柔韌性,來達到超臨界霍普夫分岐,從而讓它們的身體呈現(xiàn)出不穩(wěn)定和起伏不定的狀態(tài)。”
該團隊一開始利用計算機模型進行研究,后來他們又做出分段的多腿機器人,得以復制出蜈蚣的移動,包括它們那類似波浪一樣的身體動作。進一步研究下去的話,此類知識能夠幫助人類更好地改善機器人的運動,不論這些機器人有多少條腿。