SCARA̤̯ÌÒÓ̤ҧÓ˃lÓ§ƒlÌÏÍÑÓ §I?
ÕˋÌÕ?/span>, Ò¯ÂÍ
Ì?/span>
( ÍʈÍÓÍñËÍÊÏÍÙÎð¢ÀÌ₤ÍñËÓ´ÍÙÎÕÂ, ÍÝßpË¢ÍʈÍ, 030024)
Ì?ÒÎ?/span>: ʹ𥠃l̤̯ÌÒÍ´ÌÌÏÍÑͤ¥ð¡?/span>, Û?RBF ¥Ó£ƒ|Ó£ð¡Ì´ÀƒpÕ£ÒƒÌÏÍÑÓ¡Ó£Í?/span>, Ìͤ ð¡¢U̯Ó̤ҧÌÏÍÑÌ¿Ì°ããã?/span>RBF Ì´ÀÓ°¥Ó£ƒ|Ó£ÌÏÍÑÌØ°ÐÒ₤ËÌØ°ð§¢Ó´ð¡Êð¡ˆÍÙÓ§ƒlÍÍ?Í₤¿Í
°Ò?1 ÍÍ
°Ò?2 ÍÛ̧ÌÏÍÑ, ÌÍÕÒ¢ÍÒ¯ƒUÏÓ§ƒlÌËÌÑÕÊÍÍÛð¡Êð¡ˆÍ
°Òð¿ÕÇÓÒÎÍ ð§Ó´Ðð£Ëð£¢ÓÍÛÕˆƒlÌÒ₤ÇÌÒ₤ËÓ§ƒlÓ£ÌÓÛÍÌ¥?/span>, ÒÛÀÓÛÌÇÍ ÌÌ, ·qÒ¢ÕÌÑÍŸC¢ÛÌÙÈÓ§ ƒlÍÌ?/span>, Í´Ó¤¢Ò¯ÌÇð¤Ì´ÀƒpÕÑÍÝ̯ͧÓð¡Ùͥ͢ÍÍۧͤÎ, ÌÒÛƒÒÛÀÓÌÏÍÑʹҧ͢¨ÕÐÓ´°ÍÛͯÒñ?ÚtˆÍ¯ÌÌÒ§´Ò¢¿Ð?/span>
̤ʹð¤ßZ¡ð£
Í₤ð£ËÍ´ƒ_ͯÐ͈ÍȯÐÌÌ₤ÐÒƒÛÓÙÌÍÛ°Ó₤ÍÂð¡Õ´Íð£ÈÌ¢ðhÍâLð§?/span>, qҧʹðhÌð¡Ò§ÍÓÌÕÌÀðgð¡?/span>, ÍÎÍð¤ÐÌñÝ¿¼ÍÊÍÝÓˋ¤ÕÇÓ₤ÍÂ?ð¡ÙÍÛÌðhÌÒçð¤ÓðQÍÀÐ̤ʹðhÓ¯ÍñýÍ¥ÍÏÒ¢Í
Ëð¤ÍÛÑͤÙÍÌÍÀÒÀð¡?/span>, ÌˋÍÊÏ ð¤ðhƒcâL¿Õ ÒˆÓÑÓÒ§Í, Í ÌÙÊÙÌËÙ̃§C¤Í¤Íñ´ÍÊÏÓÍÕ?/span>, ÌðÄÍñËð¡ÍÍ¥¤ ͧÓÓ¨ð¤ÓÎÓ¿ÐÒ¢·qÇÌË, ÕÓ҈ʹÌÏÍÑÓÒÛ¤ÐÓçÍÙÒÛÀ§Ì¤ÍÒˆÍÊˋÌÌ₤Óq?ÕÍÍÝ?/span>, ð¤¤ÍñË̽§Í¥ÍÏð¡Ì¤Í´ð¤¤ÌÌ₤Ó£Í?/span>, ̤ʹð¤¤ÌÌ₤Ò¢Í
Ëð¡ð¡ˆÌ¯ÓÍ ÍÝÕÑD■c̤ʹðhÓÒ§´q¿ÒñÚtˆÕÛÕÂÌ₤̤ʹð¤¤ÌÏÍÑÍÙÎð¡Ùð¡ð¡ˆÕÒÎÓÌwÂ, Í?ÍÛÕ
ͤӴð¡?/span>, ̓̓ÒÎÌÝ̤ʹð¤¤Í´Ó¡Í§·q¢Ì°ÓÒ¢ÒÀÌÀð£ÑÒÍÇÍ
, ð¢Ìƒp࣠ÓÍÛÍÍÒ§ÍÌÌÓØÏÐÍ₤¿ð¤Ì¤Í´ðhqÌ ñð¡ð¡ˆÍÊÌÓÌÏÍуpà£, Í
ðhÕ?ƒU¢ÌÏÐÌÑÍÌÏÐÒÎÍÓð¡¥ÛÍÛÌÏÓ°£ƒl?/span>, ÍÙÍ´Ò₤¡Í΃pà£Í£¤Ì´ÀÒ₤₤ÍñÛÐÕ¨ÕÂÓ¿ÌÏÐ?̤ʹð¤¤ÍÍ
ÓÌˋÌÎð£ËÍð¢ÀÍÿL¿Ò₤₤ÍñÛÓÙð¡ÓÀÛÍÛÌÏÍ ÓÇ?/span>, qð¤ÍÛÂÒÏÍÙ?Í´ÓÍÛÕ
Ì
Íçð§¢Íƒƒpà£ÌÏÍÑÍ
ðhð¡Í₤Õ¢Í
ÓͯÕ?/span>, ð£ËÒ°ð¤Í¡¡ÒÏÓÌÏÍÑÌ?Ì°Ì Ì°Òṇ̃̓ÀÌÓÌÏÍÑÌÏÒ§ ÐÒ¢Í Í¿Ç, ÙÌËÙÍÊÓÍÙÎÒ
ÒÇÍð¤Ì¤Ì¯Ò?ÓÌ´ÀƒpÕ£ÒƒÌÏÍÑÐÓ˃lÓ§ƒlÌÏÍÑÓÙ̽§ÌÏÍѧ̰Ð?
̘ÌÍ´ÍÌð¤Ì¤Ì¯ÒÓ˃lÓ§ƒlÌÏÍÑÓÓ ÓˋÑÓ¯ÓÑÍͤӴÍÌ₤ͤ¥ð¡?/span>, Ìͤð¡¢U̯Ó̤ҧÌÏÍÑÓÛÌ°ãããÍÊÍÕÌ´ÀÓ°¥Ó£ƒ|Ó£ÌÏÍÑÌØ°, ÕÒ¢ RBF ¥Ó£ƒ|Ó£Ì̓ð¤Ì´ÀƒpÌ´Ó?/span>, ð§¢Ó˃lÓ§ƒlÓÒÓ¿ÐÒ¢ÌËÌÍ¥Í
ñÌÌ¥?ÓÓˋÓÌð¿?/span>, Ò§ÍÊÍ´Ó¤¢Ò¯ÌÇÌ´ÀÓ°ÕÑÍÝ̯ͧÓð¡Ùͥ͢ÍÍۧͤÎÐÍÌ?/span>, Í¥Í
ËÓ?ÍÒ¯ƒUÏÓ§ƒl?/span>, ÌÌͯÌÑÕÊð¤Ì¤Ì¯ÒÍ
°Òð¿ÕÇÓÒÎÍð§Ó´Ðð£¢ÓÍÛÕˆÒÀ´Ì?Ò₤ËÌÏÍÑÍ´Í
ðh̓ͥ¤ÓÒˆÍÙÎð¿ Ò§Í, ·qÑÍ₤ð£ËÌÑÕÊÓ°£ƒlÍ´ÍÍÙÎÌ´ÀÍÓð¡¥ÛÍÛ ÌÏÍÍÊÕ´·qý̯Ó͈Í?/span>, ÕÒ¢ÌÏÍѧ̰ÕÌÑÍŸC¢ÛÌÙÈÓ§ƒlÍÌ?/span>, ÍÛÓ¯ð¤Ò¢ƒl?Ò§´Ò¢¿ÒñÒ¡ˆÌÏÍÑ, Í
ðhÒ₤Í˧ÓÌÏÍÑÍÒÇ?/span>, Í₤ÍÛÓ¯Í₤¿ÕÓ¤¢ÌÏÓ°£ƒlðQÌÒ§´q¿Ó Ò§´Ò¢¿ÒñÒ¡ˆÌÏÍÑÐ?br />
1 ¥Ó£ƒ|ӣʹ̤̯ÒÍ´ÌÌÏÍÑð¡ÙÓͤÓ?
¥Ó£ƒ|Ó£ÒˆÒÚnÓÓ¿Ó?/span>, ӿͨÕÓ´ð¤ÍÌ¤Í´ð¤½¢Ì ñÍ
ñÌÍÊÌÌÏÐըͤ?ÕÓ¤¢ÌÏÐÍÊÍÕÐÍ¥¤ÒÎÍð¡ð¡ËÕð¡¥ÛÍÛÓÍÊσpà£ÓÌÏÍÑÐÕÎÍ
?/span>, Ó椥ӣ ƒ|ӣʹÒÛ¡ÍÊÌ¿ÕÂÒ₤̴̓ÀÌðhÒÓÍÒ§, Í ÌÙÊ¥Ó£ƒ|Ó£ÌÏÍÑ·qÑð¡ðƒÒçƒ_ÀÀÛ Ó̯ÍÙÎÌ´ÀÍ?/span>, ·qÑð¡¥Ó£ƒ|Ó£Í₤¿ð¢ÀÌ₤Ó·qÑÒÀÍÊÓÒ§ÍÍÍ¢¨ÕÌ?/span>, Õð¤Ì¤Í´ ð¤¤ÓÍÛÌÑÌÏÍÑÐÍ
Ñó?/span>, ¥Ó£ƒ|Ó£Ó̘ÒÇ´ÕƒU¢ÌÏÓ¿ÌÏðÄ̤ʹð¤¤ÓÕÓ¤¢ÌÏÌÏ ÍÑÍ¡ÎÌËð¤Í¡ÌÐÓ˃lÓ§ƒlÍ₤ÕÒ¢ÒÛÙÓ£Òñ̓ÍÙÎð¿ Ò§Í, Ò§ÍÊÒÏÈÍ°ÕÈð¤Ó´Ì¯ ÍÙÎÌ´ÀÍÌÒÏÍÌÒ¢¯Õƒð£ËÍÊÓÌÌ Ì°ÍÊÓÓÌÏÍÑqÓ´ÐÓ˜˜ð¡?/span>, ¥Ó£ƒ|Ó£q?Í
ðh̓ͥ¤ÓÒˆÕͤҧÍÍð¢ÀÌ₤Ó£¥ÍÒ§Í?/span>, Í ÒÒ§ÍÌÑÍÊÓÍÊÏÕÓð¡ÍÓÝ£ ÍÓÌÏÍÑÒƒÍ
Ë, ÒÏÈÍ°ÒƒÍ
Ëð¢ÀÌ₤ð¿ÕÇÓð¤ÒÀËÌÏÍÍð§ÌÏÕÛÕÂ?/span>, ÍÛÓ¯ð¢ÀÌ₤ÒÍÍÊÓÐ?/span>
̤ʹð¤¤Ó˃lÓ§ƒlÌÏÍÑð¡£ÒÎͤӴʹ̤ʹð¤½ç\̓ÒÏÍÍqÍ´ÌÏÍÑð¡ÊÌ¿Õ?/span>, ÍˋÓ´¥Ó£ƒ|Ó£ÌËÍ₤¿ÕÓ¤¢ÌÏÍ₤¿ÒÝÀÒ¢ÒÀ̴̓?/span>, ÌÍ
ͧÌÏÍÑÍ´, Ìð¥ÍÒÛÀ §?/span>, ÌÒ¢ÒÀÌ´Ó?/span>, ÌÌ
ÕÒ₤ÌÙÓÙ, ð£ËÍÍÌÑÍ
ðhð¡Ò¢¯Ìð¤ÍÒ§ÓÕͤƒlÍ, ·qÑÌÍßZ¤ÍÓÏÍßZ¤¥Ó£ƒ|Ó£Ó̤ʹðhÌÏÍÑÌØ°, Í
̘¥Ó£ƒ|Ó£Õ?Ì´ÀÌÏÍ?/span>, ¥Ó£ƒ|Ó£Í
Ì´ÀÌÏÍÑð£ËÍ¥Ó£ƒ|Ó£ÒˆÕͤÌÏÍѧ{?/span>, Í̓ð¤ÍƒÍÊÓ §IÑÌÌÐ?
ÕÓ̽§ÌÏÍÑÌÌ₤ÓÍÍÝ, ¥Ó£ƒ|Ó£ð¡ð¡ÍÛÑÓ°£ƒlÐÌ´ÀƒpÌÏÍÑÐÒ¢ÍÓÛÌ°ð£ËÍ?Hã?ÌÏÍÑÓÒÛ¤Ó¡Ó£ÍÌÌ̤̯ÒÓ̤ҧÓ˃lÓ§ƒlÌÏÍÑÌð¡¤Ó §IÑÓ ÓÙÓ¿Ðʹ̤ʹð¤¤Í´ÌÌÏÍÑð¡Ùð§¢Ó´ÌÍÊÓÛÝÌ₤Ì´ÀÓ°¥Ó£ƒ|Ó£Í?Hã?ÕýÌÈ¥?ƒlÓ§ƒlÐÍ
Ñð¡ÙÌ´ÀƒpÓ˃lÓ§ƒlÌ₤Í
ðhÌ´ÓͧӤ°Ò§ÍÓÓ˃lÓ§ƒl?/span>, ÍÛÍˋÓ´ÓË ƒlÓ§ƒlÍ₤ð£ËÕóD¢ð£âLÕÓ¤¢ÌÏ̯ͧÓÓØÏÌËÌ´ÀÌÌ´ÀÓ°ÌÏÍÑÓÌ´ÓÌ¿Ì°Ò?ÌÕ Í¤Ì?/span>, ÍÌÑ¥Ó£ƒ|Ó£Í
ðhÒˆÍÙÎð¿ Ò§Í?/span>, ð§¢ÍƒÌ´ÀÓ°¥Ó£ƒ|Ó£ÓÌ´ÓÌ¿ ͥʹÍÛÕ
ÓÌÏÍÑÒ¢§Eð¡ÙÌ₤Í₤ð£Ëð¡ÌÙð¢ÛÌÙÈÓÐÍÌ?/span>, Óæ¤Ì´ÀÓ°¥Ó£ƒ|Ó£Ó?ƒlÌÍ
ðhÌÓÀÛÓÍ₤Ó´Ò₤ÙÙaͧÂÍ¥ÌÒ¢¯ÓÓˋÓÌð¿?/span>, ð§¢ÍƒÌ´ÀÓ°¥Ó£ƒ|Ó£ÓÓ£ ÌÒÛƒÒÛÀÍÌÍ¥ÍÍÏÍÕÍ¡¡ÍÛØÐÓÝð¤Ó˃lÓ§ƒlÍ
ñÌÍÊ¢UÓ£ÌÍÍÙÎð¿ §?Ì°?/span>, Ì´ÀÓ°Õ£Òƒð¿Í
ñÌÍÊ¢UÍéÍ¥?/span>, ð¤Ò
Ó£ÍÓÍÛӯͧÂÍ¥Ì₤Ó §IÑÍñËð§ÓÕÓ¿ÍÕƒÓV̘Ìͤð¤?RBF ¥Ó£ƒ|Ó£ð¡Ì´ÀƒpÕ£ÒƒÍ
ðh̯ͧ§{ðÙhÌ?/span>, Ìͤ ð¤?RBF Ì´ÀÓ°¥Ó£ƒ|Ó£, ÍÛÓ¯ð¤Ó˃lÓ§ƒlð¡Ì´ÀÓ°Õ£ÒƒÌÏÍÑÓÌÌÓ£ÍÐ?/span>
2 ÒñÒ¡ˆÕÛÕÂÌÒ¢¯ð¡Í´ÍÍÙÎÌ´ÀÍ
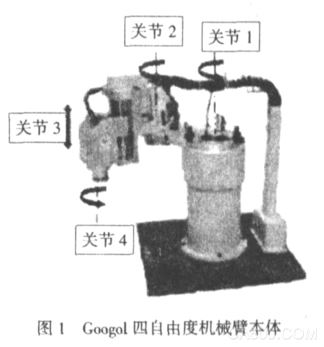
̘ÌÓÍÛÕˆÒÛƒÍÊÌ₤ͤը GRB400 ÍñËð¡Ì¤Í´ð¤?/span>, ƒlÌͧÂÍ¥ð¡?SCARA ÍÍÐ^ÕÂÍ
°Ò?/span>( ÒÏ̓ 1) , Ì₤Í
ñÌ?4 ð¡ˆÍ
°ÒÓ̘Ң̤ʹð¤¤ÐÍ
Ñð¡ÙÍ
°Ò?1 ÍÍ
° Ò?2 Ì₤ÍÒ§˜Í
°Ò?/span>, Í
ðh 2 ð¡ˆÒˆÓÝͤÎ, ÍÛÌÍÌ ƒp?Xã?/span>Y ·q°ÕÂÓÒ¢Í?/span>; Í
3 Ì₤ÓǃU¢Í
°Ò?/span>, ÕÒ¢ð¡Ì qÌËÍÛÌÍÌ ƒp?Z Ò§ÇÌ¿ÍÓqÍ´( ð¡ð¡qÍ´) ; Í
4 ð¡¤ÌÒ§˜Í
°Ò?/span>( ÌÒ
Ó?qÍ´) , Ó´ÌËÒ¯ÌÇÍñËÍ
ñÓÒÏ Í¤ÎÐ̤ʹðh̨Ө₤ÍñËÍ
ñÓÍ¥Õ?ÍˋÓ´Ì?Í?Í?Ó?Ó?Ì?Ì?ÍÙ?Õ?҃ͤÌÏÍÑ, ÓÒÛ¤ð¡Í₤ð£ËÍÌ?ÌÏÍÑ 16 Òñ₤ÍñËÍ
¼Í´ GRB400 ̤ʹð¤?Ì?Ó¨?ÕÂ?ÒÈ?ð¤?Ó?¥?Ì?Ó?/span>, qÍ₤ð£ËÌ ¿ÌÛÍÛÕ
ð§ð¡Ó ÕÒÎÍ ÒÈ?§ Í?Ó?Ó?¥?Ì?Ó?Ì̯ʹÌÓˆÐÍ
Ñð¡ÙÍ
°Ò?3ÐÍ
° Ò?4 ð¡Í
°Ò?1ÐÍ
°Ò?2 Ì₤ÍÛ Í
´ÒÏÈÒÎÓ, ÒÍ
°Ò?1ÐÍ
°Ò?2 ð¿ÕÇÌ₤ÒÎÍÓÐ̘Ìð¡£ÒÎÌ₤ ÒÏ?Í?Í
?Ò?1 Í?Í
?Ò?2 Ó?·q?ÒÀÀÕÛÕÂ?/span>, ÕÒ¢ÒÛƒÒÛÀÌ´ÀÓ°¥Ó£ƒ|Ó£ð¥¤ÌÌÏÍÑÍ?/span>, ð§¢Í
ÑÍ´ÍÍÙÎÌÏÒ§ÌÇÍ˧, ÍÛÓ¯ qÓÛÓÒ§´q¿ÒñÚtˆÐ?
Ì ØṲ̂ʹ𤽢ʹÍÙÎÍÍ´ÍÍÙÎͤÓÀÓËÒ₤, ÕÓ´ÌÌ ¥ÌÌËÍÒ§·qÀÀ̰̓ӨӰ£ƒlÓÍ´ÍÍÙÎÌ¿§EÐͧƒpà£ÍÙÍ´ÌˋÌÎÍð¡¥ÛÍÛÌÏÍ ÓÇ ÌÑ, ƒpà£ÓÍ´ÍÍÙÎÌ¿Ó´Í₤ð£ËÒÀ´Óʤð¡?/span>: ü=M( ö) öB +V( ö, öC ) öC +F( öC ) +T(d ö, öC ) +G( ö)
( 1) Í¥ð¡Ù: M( ö) Ò¨Óϯð¡¤Ì₤ÌÏÓˋÕ?/span>; V( ö, ö! ) ¢UŸCÄ¥íd¢ÍÍË̯ÍÍ?/span>; F( ö) Ì₤ÕÌÍÍ´ÌÌˋÌÎÓˋÕ?/span>; G( ö) ÒÀ´ÓʤÕÍÌͤ; T(d ö, ö! ) ð£ÈÒÀ´ÓÝÌÌÒÇÒ?ÍÍÌ̴̓ÀÒ₤₤ÍñÛÌÍ¥ÒvÓ̯ʹÐ?
Í¢§Ó˃pà£ÓÌˋÌÎÍð¡ÓÀÛÍÛÌÏÍ ÓÇ ÌÑ, ƒpà£ÓÌ ¢U¯Ì´ÀÍÓÍ´ÍÍÙÎÌ¿§E?Í₤ð£ËÒÀ´Óʤð¡?/span>: ü=M( ö) ö# +V( ö, ö! ) ö! +G( ö)
( 2) Í¥ð¡Ù: ð¡ÍƒÓ´ ci ÒÀ´Óʤ cosö¡i, si ÒÀ´Óʤ sinö¡i, cij ÒÀ´Óʤ cos( ö¡i+ö¡j) , sij ÒÀ´Óʤ sin ( ö¡i+ö¡j) ÐÍ
Ñð¡?/span>, l1, l2 ÍͨÒÀ´ÓʤÍ
1ÐÍ
°Ò?2 Óբͤ?/span>; lc1, lc2 ÍͨÒÀ´ÓʤÍ
1Ð?Í
2 ÓÒÇ´Õð¡Ùͯ͢ҧ˜Í´ð¡ÙÍ¢ÓÒñ¥?/span>; I1, I2 ÍͨÒÀ´ÓʤÍ
1ÐÍ
°Ò?2 ÓÒ{ Í´Ì₤Õ?/span>; ö=[ ö¡1 ö¡2] T, ü=[ ü1 ü2] TÐ?/span>
M( ö) = M11 M12 !M21 M22", V( ö, ö) = ü
11 ü
12 !ü
21 0 ", G( ö) = 0!0"
M11=m1ôñl2c1+m2ôñ( l21+l2c2+2l1ôñlc2ôñc2) +I1+I2;
M22=m2ôñl22+I2; M12=M21=m2ôñ( l2c2+l1ôñl2ôñc2) +I2; ü
11=( - m2ôñl1ôñlc2ôñs2)ôñö¡" 2
ü
12=( - m2ôñl1ôñlc2ôñs2)ôñö¡" 1+( - m2ôñl1ôñlc2ôñs2)ôñö¡" 2; ü
21=m2ôñl1ôñlc2ôñs2ôñö¡" 1
3 RBF Ì´ÀÓ°¥Ó£ƒ|Ó£ÌÏÍÑÍ´Ó£Ḭ̀ͧÍÛÓ¯
3.1 Í
ðhÍÒ¯ƒUÏÓ RBF Ì´ÀÓ°¥Ó£ƒ|Ó£ÌÏÍÑÍ´Ó£Ì?
ͤը̤̯ÒÌ₤ MIMO ƒpà£, Ì ØÛƒpà£ÓÍ´ÌÌÏÍÑÓ¿Ó?/span>, ̘ÌÒÛƒÒÛÀð¤?ð¡¢UÍ
ñÌÍÒ¯ÓþÓÍÊÍÕ RBF Ì´ÀÓ°¥Ó£ƒ|Ó£, ÒÏ̓ 2ÐÒ₤˃|Ó£Ì₤ÍÒƒÍ
Ë ð¤ÒƒÍ¤Óƒ|Ó£, Óæ¡Õ´ÍƒlÌ: Íðgƒ|Ó£ÐÍð£ÑÓ§ƒlÍÍÒ¯ƒUÏÐÍð£ÑÓ§ƒl?ÍÍð£ÑÓ§ƒlÍͨÌ₤Í₤ؤ̯ÒÍ
1 ÍÍ
°Ò?2 qÒÀÒÛÀÓÛÓ?/span>, ÍÒ¯ƒUÏÓ§ƒlÍ₤¿ ð¡Êð¡ˆÍÙÓ§ƒlÒ¢ÒÀÓ£¥ÍÐÓ§ƒlÓð¡£ÒÎÒÛÀÓÛÓÝÍð£ÑÓ§ƒlÌËÍÛÌ, Í
Ñð¡Ùð¡ÊÍ
°Ò?Óð§ƒ|ÛÒ₤₤Íñ?e1 Í?e2, ð£ËÍÍ
Ò₤₤ÍñÛÍÍÓ?ec1 Í?ec2 Íð¡ˆÍÕÍͨð§ðă|?ƒlÓð¡Êð¡ˆÍÙÓ§ƒlÓÒƒÍ
Ë; ҃ͤð¡¤Í
°Ò?1ÐÍ
°Ò?2 ÓÌÏÍ u1 Í?u2Ð?/span>
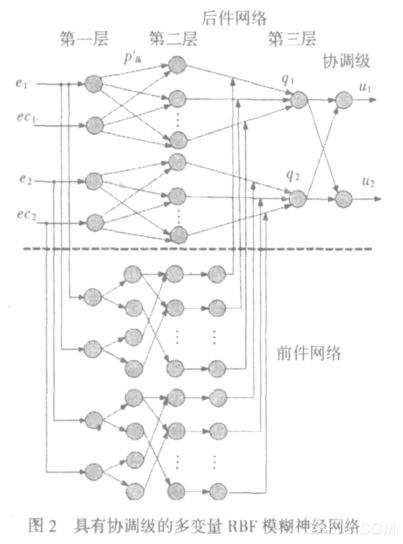
Íðgƒ|Ó£ÕÓ´ RBF ¥Ó£ƒ|Ó£ƒlÌ, Í
Ñð¡Ù, ÒƒÍ
ËÍÝð¡Ùð§¢Ó´ÍƒÍͤͧÌ?( RBF) ð§ðÄàz£Ò{¢Uíd§Ì?/span>,ÛÒ¢ƒlÙÓÒƒÍ
Ë̯ͥÍÌÂÌÍ
ðhð¡ÍÌ´ÀÓ°Ì ?ÒÛ?/span>, ÍÎãÕ¨, ÌÙ?/span>, Õ?/span>, ÒÇ?/span>, ð§ãÓÌ´ÀÓ°ÕÑÍÝͤÎÐÕÒ¢ÕÌÑÍŸC¢ÛÌÙÈÓ§ƒlÌ¢zíd§Ì?ÓÍÌ?/span>, Í₤ð£ËÍ´Ó¤¢Ò¯ÌÇÌ´ÀÓ°ÕÑÍÝ̯ͧÓð¡Ùͥ͢ÍÍۧͤÎÐð¡ÙÕÇÍÝð§Ó¯Í§ÂÍÎ ã?/span>if x1 is a, x2 is b, then y is cãÓð¿ÓÏ₤Ì´ÀÓ°ÒÏÍ, ÌÍÕgÄ 1, ÕÓ´ Takagi- Sugeno( T- S) ƒ|Ó£ƒlÌ, Íüx₤ð¡ˆÒƒÍ¤Ì₤ð¡Êð¡ˆÍÌÓð¿¢U?/span>, ¥ÛÍÛÍÙÓ§ƒlÓÌ₤?ÌÀÌ´ÀƒpÒÏÍÓÕͤͤÎÐ҃ͤÍÝð¡?RBF ƒ|Ó£ÓÌ¢zíd§Ì¯Ì₤ƒU¢ÌÏͧÌ?/span>, Í_₤¿ Ì₤ð¡ˆÒƒÍ
ËqÒÀÍ ÌÍÌÝÍÐ?
Íðgƒ|Ó£Ì₤ÒƒÍ
ËÓÍÊÕÀ¿Í¥?/span>, Ó´ÌËÒÛÀÓÛÌ₤ð¡ÌÀÒÏÍÓÍðg, ·qÑÒÛÀ§Ó°£ ƒlÓ҃ͤ, ÍÛÓ¯ƒU¢ÌÏÓ£ÍÐÒƒÍ
ËÓƒlӿ̯ÓÙð¤Ó£ÍÛÒƒÍ
ËÕÓÌ´ÀƒpÓÙƒUÏ̯, Ì₤ð¡ð¡ˆÓ£Ó¿Íð£ÈÒÀ´ð¡ÌÀÒÏÍÐÍð£ÑÓ§ƒlÓÒ¯ÌÇÍ̯ð¡¤Ó§ƒlÒ¢ÌËÌÍ?pilk,v> ͧÍÒˆÒ¢ÒÀÍÛÍw
Í?/span>, ҃ͤð¡?q1, q2, ÓÑÍqÍ
ËÍÒ¯ƒUÏÐ?
ÍÒ¯ƒUÏÌ₤ÓÝÍÍÝÓ˃lÓ§ƒlÌÌ?/span>, ÍÛÓð§Ó´ÛÝÌ₤Í₤¿ð¡ÊÒñ₤ÌÏÍÑð§Ó´Ò¢ÒÀ?ƒl¥Í, ÕÒ¢Ò¯ÌÇ¥Ó£Í
ÓÌÍ¥ÌËÌÑÕÊÍ
1 ÍÍ
°Ò?2 ð¿ÕÇÓÒÎÍ, ð£ËÒƒƒ ͯÍÊÍÕÌÏÍÑ, ҃ͤð¡?u1 Í?u2ÐÓ˃lÍ
ÕÓ´ S ÍͧÌ?/span>, qÌËÌÓ°£ÌŸCÄ vig, i 𡽃ͤÍÕÓð¡ˆÌ¯, ÌÏÍÑÍ´ÒƒÍßZÄ: ui=(f si) =f 2 i = 1 $#qivig%=1(/ 1+e- ö¥si) ( 3)
3.2 RBF Ì´ÀÓ°¥Ó£ƒ|Ó£ÌÏÍÑʹӧ̰ÍÛÓ¯ÌÙËÕˆÊ
ÌÙËÕˆÊ 1: Íͨ¥ÛÍÛð¡Êð¡ˆÍ
1ÐÍ
°Ò?2 ƒ|Ó£ð¡?e Í?ec ÓÕÑÍÝͤÎÍÍ; ÕÍÛð¡Êð¡ˆÍÙÓ§ƒlÍÒˆÓÕÑÍÝͤÎÍÍð¡ÙÓð¡ÙÍ¢Í?C ÍÍۧͤÎã°ÓÍÍ?/span>; ð£ËÍ ÍÍð£ÑÓ§ƒlÓÌÍ?P ÓÍÍ?/span>; ÕÍÛÍÒ¯ƒUÏð¡ÙÓÌÍ?V ÓÍÍÏÍ?/span>; ÕÍÛÕ?ÍÝ̯ͧÓÍÙÎð¿ ÕÓ &c, &ã?/span>, Íðgƒ|Ó£ð¡ÙÒ¢ÌËÌÍ¥ÓÍÙÎð¿ ÕÓ &p ð£ËÍÍÒ¯ ƒUÏð¡ÙÌÍ¥Ó°£Ì¯ÓÍÙÎð¿ ÕÓ (ÐÍÊÏÍÒÀ´§C¤ÓˋÕ?/span>, Í?t=1Ð?
ÌÙËÕˆÊ 2: ÕÌ ñ̓ͯÍ
1ÐÍ
°Ò?2 Óð¡Êð¡ˆÓ£ÍÛÍ?"(1 0) Í?"(2 0) , Íð¡Ê ð¡ˆÍÙƒpà£ÒƒÍ¤ "d1, "d2, ÒÛÀÓÛÒ₤₤ÍñÛ e(1 t) , e(2 t) ÍÒ₤₤ÍñÛÓÍÍ ec(1 t) , ec(2 t) Ð?
ÌÙËÕˆÊ 3: ÒÛÀÓÛ̴̓ͯÀÓ°¥Ó£ÌÏÍÑÍ´ÓÌÏÍÑ҃ͤ u1, u2, qÒÀÌÏÍÑÍÒÛÀ §Ð?/span>
ÌÙËÕˆÊ 4: ÒÛÀÓÛÓÛÌ Í§Ì¯ E= 12( yri- yi) 2, yri, yiÍͨÒÀ´Óʤƒpà£ÓÌÌÒƒÍ?ÍÍÛÕ
ÒƒÍ?/span>; ·qÑð¢ÛÌÙÈÍÒ¯ÓþÌÍ¥Ó°£Ì¯ÓÍÙÎð¿ ÕÓ (; ÒÛÀÓÛð¢ÛÌÙÈÍÍÙƒ|Ó£ ÓÕÑÍÝͤÎÓð¡ÙÍ¢?CÐÍۧͤÎã°ÍÌÍ?PÐ?
ÌÙËÕˆÊ 5: ÒÛÀ§Û t=t+1, Íð¡ð¡ð¡ˆÕÌ ÿL¿, qÍÌÙËÕˆÊ 1 qÒÀÒÛÀÓÛÐ?
4 ð£¢ÓÍÍÛÕˆÓ£Ì?
̘ÌÍ₤¿Í
°Ò?1ÐÍ
°Ò?2 qÒÀð£¢ÓÍÛÕˆ, Í´ÍÍÙÎÌ´ÀÍÍÎÍ¥?( 2) , ͤը GRB400 ̤̯ÒÓƒlÌÍ̯ m1=1.331 kg, m2=0.482 kg, l1=200 mm, l2=200 mm, I1=1.385û10- 2 kgôñm2, I2=5.737û10- 4 kgôñm2ÐÒƒÍ
ËÍÕ?e1, ec1, e2, ec2ÓÕÑ ÍÝ̯ͧÓÍÍÍðÄ{ ÌÙÈÍÊÏ, ÌÙÈͯ, Õ?/span>, ÒÇͯ, ÒÇÍÊÏ} ; e1, e2Í?ec1, ec2ÕÑÍÝͤÎð¡Ù ͥ͢ÍÍ¨Í C1=C2=[ 3, 1.5, 0, - 1.5, - 3] , C1=C2=[ 1, 0.5, 0, - 0.5, - 1] , ÍۧͤΠã?/span>1=ã?/span>2=[ 1, 1, 1, 1, 1] ÐÍö¡"(1 0) =ö¡"(2 0) =0 rad/s, ÕÌ ñÍ´Ìð¡?0.000 5 s, ÌÓ°£ Ì?P1 ÓÍÍÏÍ¥Õ§ÕðÄ 1; ÍÒ¯ƒUÏÓÌÓ°£Ì¯ÓˋÕ?V ÓÍÍÏÍ¥ÕðÄÍð§Õ?/span>; ̤̯ÒÍ
°Ò?1 ÓÍÙÎð¿ ÕÓð¡?/span>: öý1c=0.55, öý1ü=0.31, öý1p=0.22; ̤̯ÒÍ
°Ò?/span>2Ó?ÍÙÎð¿ ÕÓð¡?/span>: öý2c=0.6, öý2ü=0.3, öý2p=0.1Ð?
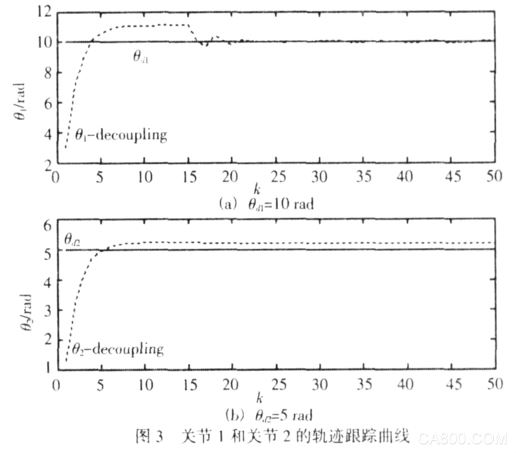
Í?3 ̧CßZÄÍ
1ÐÍ
°Ò?2 Í´ÌÏÍÑÓÛÌ°ÍÛÌ?50 óÀÒPð£ÈÍ, ƒlÍÑÓÒñ ÚtˆÌýƒU¢ÍƒÐÓÝÍ?3 Í₤ÒÏ, ÍÙÎ𿠧̰qÒÀÍ?20 óÀÓÌÑÍ?/span>, ÌÏÍÑÍ´ÓÒñÒ¡ˆÒ§?q¿Í¯ÝÍÌÌÒ§´qwÍÐð£¢ÓÓ£ÌÒÀ´ÌÌÏÍÑÍ´Í
ðhÒ₤Í˧ÓÒñÚtˆÓ¿Ì?/span>, Ò§ÌÑ ÕÊÍ
°ÒÍÕð¿ÕÇÓÒÎÍð§Ó´, ð§¢Í
°Ò?1ÐÍ
°Ò?2 Ò§Íͨ͢¨ÕÒñÚtˆÍ¯ÌÌð§Ó§ÛÐ?nbsp;
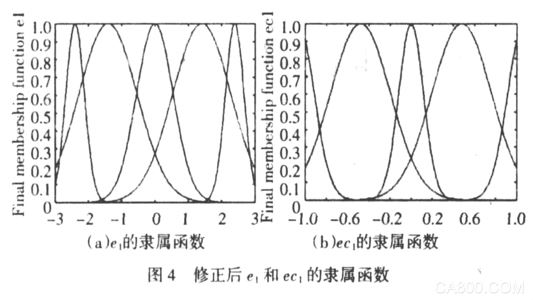
Í?span style="font-family:Times New Roman;color:#231F20;">4 Ì₤Í
°Ò?1 Í´ÍÙÎð¿ ÓÛÌ°Ó£q?30 óÀÒPð£ÈÍÓÕÑÍÝͧÌ?/span>, ̓ð¡ÙÌ¡
̯ ͯÒÀ´Ì?/span>, Ò₤ËÓ§ƒlÌÍͯð¢ÛÌ¿ð¤Ì´ÀÍÓÕÑÍÝ̯ͧÓð¡Ùͥ͢ÍÍۧͤÎÐ?/span>
Í?5 ð¡¤Ì¤Ì¯ÒÍ
1 Í´Íð§ÕÑÒñÒƒÍ
Ëð¡ð¡ð¥ ƒl?PID Ì₤ÒƒÓÒñÚtˆÌý ƒUîÓÝÍ?5 Í₤ÓË, ÕÓ´ RBF Ì´ÀÓ°¥Ó£ÌÏÍÑÍ?/span>, ÌÏÍÑÌÌÌ̃ð¥ð¤ð¥ Ó£ PID ÌÏÍÑÍ?/span>, ð§¢Ó°£ƒlÓ§E_ÛÌÇÌÌƒÍ Í¢¨, ·qÑð¡Ù
Ò¯ÕÌÌøÛ?/span>, ÒÏͤÎÓÌLÍ?ÒÍÇð¿ÌÍÊÏÓÍͯÐ̓ 5 Í
1 Íͨʹð¡Ê¢UÌÏÍÑÓÙÓËð¡ÓÒñÚtˆÌýƒU¢ÍƒÐ?/span>

5 ƒlÒ₤Ù
ð£¢ÓÍÛÕˆƒlÌÒÀ´Ì,RBFÌ´ÀÓ°¥Ó£ƒ|Ó£ÌÏÍѧ̰ҧð£Ë҃ͯÓÓ§ƒlÒÛÙƒl̘À̯҃ƒÍ¯Ì£ÀÌÓÒñÒ¡ˆÓØ?/span>,Í
ðhÒ₤Í˧ÓÕýÌÏÍÌÍ¿ý̯ÌÏÒ§,Í₤ÍÛӯ̤̯ÒqÓÝ£Í
ðhÕÍÊqÍ´ÌÏÒÇ´ÓÕƒU¢ÌÏÍ₤¿ÒÝÀÓÒ§´Ò¢¿ÒñÒ¡ˆÌÏÍÑÐ?/span>
ÌÇÍÊð¤ÏÍð£Ó£ð¢ÀÌ₤Ò₤ÿL£Í§Í
˜Í¡ÍÛƒ|ÿ¥www.ypd-robot.com/product/zwxxl7c7
ÌÍÝÝÌÎÌÛÒƒƒÒˆÍ´Í¢UÌÌÕÍ
˜Í¡ð¡£ÒËð¥ðÄÍ
Ç̤̯ÌÍQÒÑÌËÒÑÍÊÓÍÍÕÌˋð¥ðÄÍ
ÇÓSCARA̤̯Ìÿ¥ÌÎÌÛÒƒƒÒˆÍ´Í¢UÌÒñÕͤ͡ÙÍ¢ÍQÓ´°ÌÙËÌ´qð¥ð¡¤Í
ÇSCARA̤̯ÌðþÍÓÍ¡ÍÝÐð¤ð¡Õ´Í¡ÍÝ,ÌˋÍÊσlÒËÒÏÌ´Àð¡ð¡ƒl?Ó¯Ìð¤ÏÍÍ₤ð£ËÌ£ÀÒ—ÌÌÏÒÈ
Õ
?ð¥¤ÌÕˋÝÍ´,ÍÊÓþÍÌÙËÒñÕÍñËð§Ó¨?̤ʹð¤¤Ìð£ÑÍñËð§Ó¨§{̯ÌÌ₤ͤӴÐÍ¿¢Ì°Í¤Ó´ð¤ÕÍÝÍ ÍñËÐ?CÐÕÈÍÕËÛÌÐÌݧҧÎÒÈ
Õ
ÓÙÒÀð¡ÍQð£Ëð§Ì̘ÐÕ¨ÍÒÇ´ÐÕ¨ð¤ÏͤÓÌð§_ƒlÍð¡ßZ¥ð¡ÌÍÀÓÍ¢çÿ¥Í ÕÍñËÍ҈ʹÍÐÌ ð¤¤Íð¤Ïð¡qÓ´ÍQÍ¿¢ÒñÍÛÂÌÿLըͤÎÒ₤ðÙhÐ?
qð¤·qÇÌËÍQ҈ʹÍÕÂÍÌË̯ÌÍ¥ÍQÌð£˜ÍˆÍÌð¡¤Í¡Í¤ÓÕÂÒñÒ
Òð¡Ì₤Ò¢§ÕÒ
ÐÍ
˜Í¡Ì°´ÕÌÕ ÍÂÕÓ·qÇÒ§£ÍÐÍÊÍ
ÍÍQÍð¤Í₤Ó´ÍÍ¿Í
£ÌŸChÍQÍ
˜Í¡Í¡ÌÌ₤ð§Íð¤Ìð¡ÍÓÒÏÕÐÌ°Ì°ÍÒÌ₤ÍQÍóÕ¥ÍÝÍÊÏÍÛÑÓøÓø¯ÌÍ
ËÍQÍð¤Í¯Ò₤Í£Í̈ÓÑð¡ÍÓð¤ÿ¥§HÓ ÇÒˆÍñÝÓÒÕͤÍQð¡ÓÌÏ̯ÓÍÌÐ̯ÓÓËÒ₤Ð̯Óð§Õˆÿ¥ÍÙÎð¥ÕÍÀÒˆÍñÝð§Õˆð¡ÓÓÌ¿Í¥ÿ¥
Í ÌÂÎÌÍËÌÿ¥Ì₤Ìð£˜ÍÊÏÍÛÑÍ
ÝÍÒ¢§ÌÝÓÓÍ¢çÐ?
Í´ÍÊÏÍÛÑÓÍ
ÝÍ͈Íð¡ÿ¥ÌˆÌËÍQÌÎÌÛÒƒƒÍ₤ð£ËÒç¯ÍƒÌÇÕ¨ÌÇÒ¢ÍQ?