1 引言
基于雙目視覺系統(tǒng)的運(yùn)動(dòng)人體檢測與識(shí)別方法研究在移動(dòng)機(jī)器人定位與導(dǎo)航、人體跟蹤等方面具有重要的地位���。由于運(yùn)動(dòng)人體檢測受到移動(dòng)機(jī)器人復(fù)雜應(yīng)用環(huán)境的限制,給檢測增加了難度[1]���。本論文以雙目立體視覺系統(tǒng)為背景,針對(duì)在雙目視覺系統(tǒng)中對(duì)運(yùn)動(dòng)的人體特征檢測檢測與識(shí)別對(duì)立體匹配高準(zhǔn)確性和實(shí)時(shí)性的要求,研究了連續(xù)視差圖差分算法,實(shí)現(xiàn)了利用視差圖從背景中分割人體,并通過實(shí)驗(yàn)驗(yàn)證了方法的正確性與可行性����。
2 全局運(yùn)動(dòng)估計(jì)
全局運(yùn)動(dòng)估計(jì)[2]是一種典型的參數(shù)估計(jì)方法,即利用魯棒的參數(shù)估計(jì)方法建立運(yùn)動(dòng)參數(shù)的模型�����。本論文利用特征角點(diǎn)的運(yùn)動(dòng)矢量來獲取全局運(yùn)動(dòng)參數(shù),并對(duì)視頻圖像序列進(jìn)行運(yùn)動(dòng)計(jì)算補(bǔ)償��。該方法具有運(yùn)算效率高,抗干擾能力強(qiáng)的優(yōu)點(diǎn)���。
2.1 建立運(yùn)動(dòng)參數(shù)模型
建立全局運(yùn)動(dòng)估計(jì)運(yùn)動(dòng)參數(shù)模型���。其中三維運(yùn)動(dòng)物體在圖像平面上的二維投影如圖1所示����。
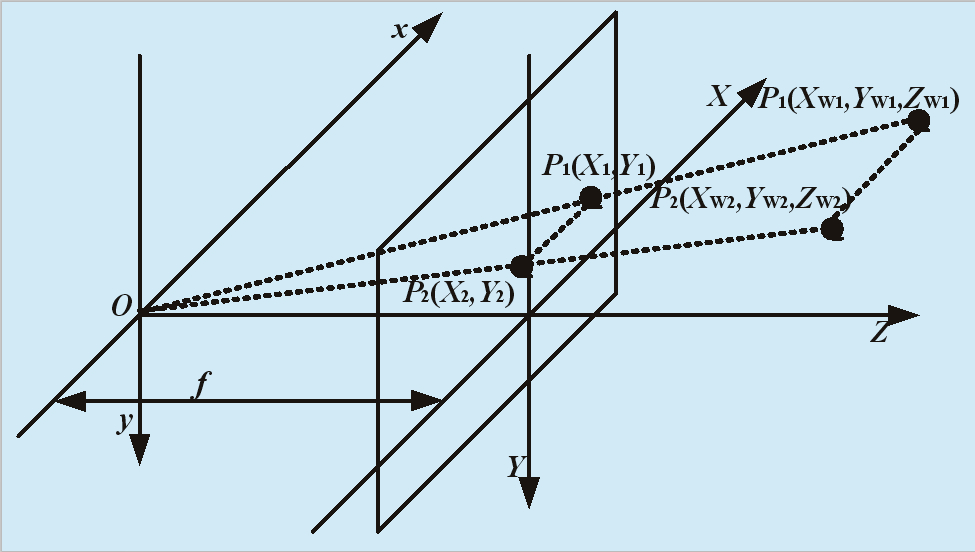
圖1 三維運(yùn)動(dòng)的二維投影
P1����、P2為第k、k-1幀場景圖像中物體位置,在圖像平面內(nèi)投影為p1���、p2?�;谝苿?dòng)機(jī)器人進(jìn)行慢速運(yùn)動(dòng),因此選用仿射運(yùn)動(dòng)參數(shù)模型表示由移動(dòng)機(jī)器人運(yùn)動(dòng)引起的背景運(yùn)動(dòng)�����。
2.2 LMedS估計(jì)法
在進(jìn)行全局運(yùn)動(dòng)估算時(shí)視頻圖像序列中人體運(yùn)動(dòng)的區(qū)域會(huì)影響到全局運(yùn)動(dòng)估計(jì)的結(jié)果,故選用具有較強(qiáng)魯棒性的估計(jì)方法—LMedS估計(jì)法[3]�。LMeds具有最大的崩潰點(diǎn)為50%,因而具有很好的魯棒性��。
2.3 全局運(yùn)動(dòng)估計(jì)的實(shí)現(xiàn)
全局運(yùn)動(dòng)補(bǔ)償是指在估計(jì)出全局運(yùn)動(dòng)模型參數(shù)后,以當(dāng)前圖像幀視差圖為基準(zhǔn)對(duì)參考圖像幀視差圖做幾何校正,并通過雙線性差值進(jìn)行幾何校正對(duì)得到像素點(diǎn)的灰度值進(jìn)行校正的處理過程[4]�����。
3 運(yùn)動(dòng)人體特征處理
3.1 差分圖像二值化
視差圖是以圖像對(duì)中任一幅圖像為基準(zhǔn),其大小為該基準(zhǔn)圖像的大小,元素值為視差值的圖像�。對(duì)圖像幀視差圖和校正后的參考圖像幀視差圖進(jìn)行差分運(yùn)算,得到包含運(yùn)動(dòng)人體區(qū)域的差分圖像。采用最大方差閾值法來將圖像中運(yùn)動(dòng)目標(biāo)區(qū)域從差分圖像中分離出來,需要選擇有效的圖像分割算法對(duì)其進(jìn)行二值化處理����。其原理是將圖像灰度直方圖在某一閾值處分割為兩組,并將分成的兩組間方差為最大時(shí)決定閾值���。設(shè)圖像的灰度值級(jí)數(shù)為1-m,灰度值為i的像素點(diǎn)個(gè)數(shù)為ni��。
此時(shí)得到像素點(diǎn)總數(shù)為:
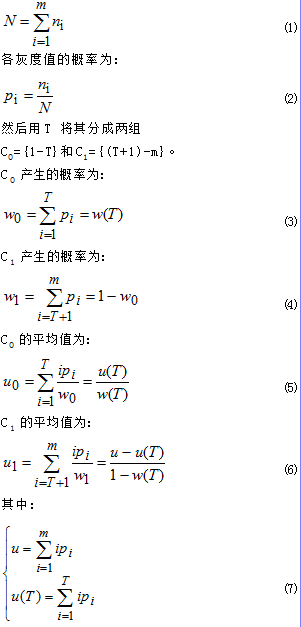
u是圖像的灰度平均值,u(T)是閾值為T時(shí)的灰度平均值,全部采樣的灰度平均值為u=w0u0+w1u1����。
從1-m改變T,求max(δ2(T))時(shí)的T*值,此時(shí)T*便是閾值����。δ2(T)為閾值選擇函數(shù)。無論直方圖有無明顯的雙峰,最大方差閾值法都能得到比較好的結(jié)果�。
3.2 形態(tài)學(xué)濾波
通過開閉運(yùn)算對(duì)運(yùn)動(dòng)人體特征進(jìn)行形態(tài)學(xué)濾波,是運(yùn)動(dòng)人體檢測重要的環(huán)節(jié)[5]�。
首先對(duì)圖像進(jìn)行腐蝕與膨脹處理后對(duì)圖像進(jìn)行開閉運(yùn)算�����。開運(yùn)算和閉運(yùn)算都由腐蝕和膨脹復(fù)合而成:開運(yùn)算是先腐蝕后膨脹,而閉運(yùn)算是先膨脹后腐蝕[6]���。
差分圖像進(jìn)行二值化處理后產(chǎn)生的孤立孔洞�����、斷裂邊緣和隨機(jī)噪聲點(diǎn)等可以通過合理的形態(tài)學(xué)濾波組合解決����。但是運(yùn)算的先后順序要進(jìn)行適當(dāng)?shù)陌才拧?br />
3.3 連通分量提取
本論文中采用基于形態(tài)學(xué)膨脹操作的方法提取連通分量,連通性分析的判據(jù)為8連通���。如圖2所示為連通分量提取效果模擬。
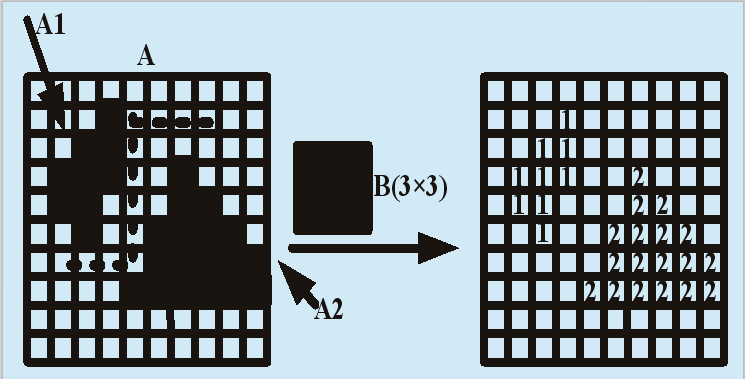
圖2 連通分量提取效果模擬
A中有多個(gè)連通分量,從連通分量A1內(nèi)部某個(gè)點(diǎn)的圖像C開始,不斷對(duì)結(jié)構(gòu)元素B進(jìn)行膨脹�。由于A2與A1間至少有一條1個(gè)像素寬的空白縫隙,則每次膨脹都不會(huì)產(chǎn)生位于A中其它連通區(qū)域之內(nèi)的點(diǎn),故只需將每次膨脹后的圖像和原始圖像A相交,就能把膨脹限制在A1的內(nèi)部�。
完成連通分量提取后由于連通區(qū)域的每個(gè)像素點(diǎn)都有對(duì)應(yīng)編號(hào),因此可得到每個(gè)編號(hào)對(duì)應(yīng)的總像素點(diǎn)占圖像總像素點(diǎn)的比例。再與預(yù)先規(guī)定的人體大小閾值相比,小于閾值為誤判,并將此連通區(qū)域變?yōu)楸尘?其余連通區(qū)域?yàn)闄z測到的正確人體區(qū)域�。
4 實(shí)驗(yàn)結(jié)果與分析
圖3為對(duì)運(yùn)動(dòng)人體檢測圖像第17和18幀圖像進(jìn)行立體匹配的結(jié)果圖�����。然后在對(duì)進(jìn)行全局運(yùn)動(dòng)估計(jì)時(shí)選取第17幀圖像為參考圖像幀,第18幀為當(dāng)前圖像幀,完成全局運(yùn)動(dòng)模型參數(shù)估計(jì)后對(duì)第17幀圖像對(duì)的視差圖進(jìn)行全局運(yùn)動(dòng)補(bǔ)償��。
LMeds的隨機(jī)特征點(diǎn)對(duì)的次數(shù)h=45,取1����。如圖4所示為補(bǔ)償后的第17幀圖像對(duì)視差圖��。
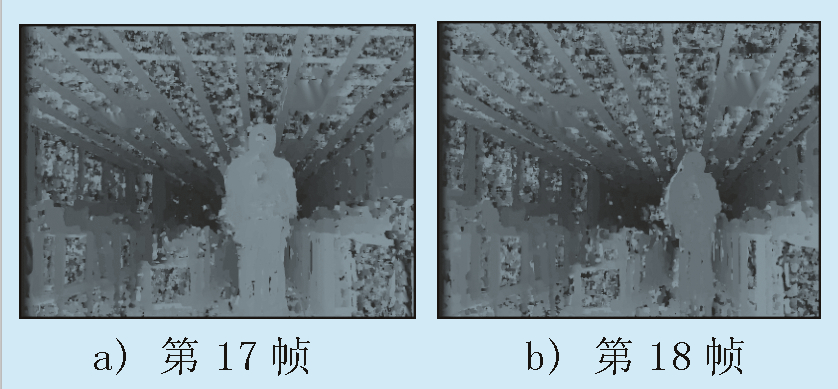
圖3 立體匹配結(jié)果
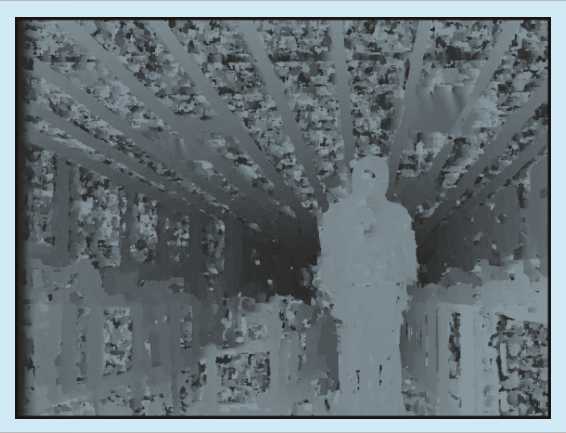
圖4 全局運(yùn)動(dòng)補(bǔ)償后的視差圖
將第17幀圖像對(duì)補(bǔ)償后的視差圖與第18幀圖像對(duì)的視差圖進(jìn)行差分運(yùn)算,并對(duì)得到的差分圖像進(jìn)行二值化處理,得到的二值圖像如圖5所示�。

圖5 二值圖像
對(duì)圖中存在大量的孤立的孔洞����、斷裂的邊緣��、隨機(jī)噪聲點(diǎn)等進(jìn)行閉運(yùn)算�、開運(yùn)算處理�。閉運(yùn)算、開運(yùn)算的實(shí)驗(yàn)結(jié)果如圖6��、7所示:

圖6 閉運(yùn)算后的圖像
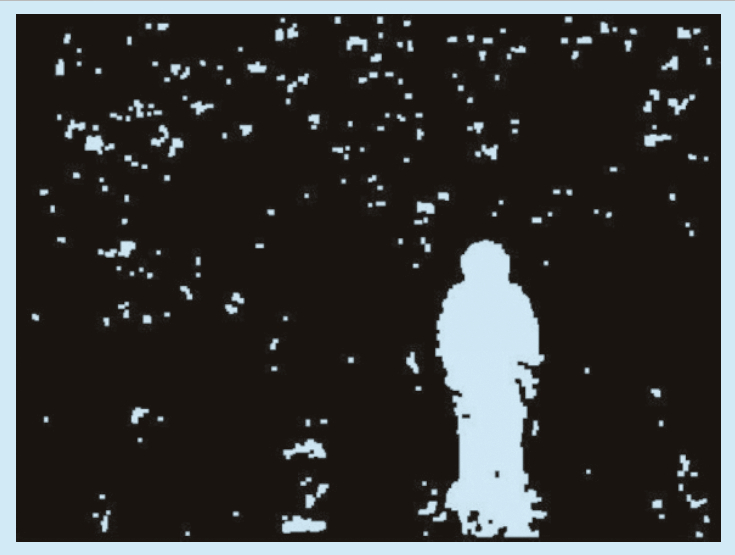
圖7 開運(yùn)算后的圖像

圖8 運(yùn)動(dòng)人體區(qū)域
對(duì)形態(tài)學(xué)濾波后的圖像進(jìn)行連通分量提取,同時(shí)去掉總像素點(diǎn)個(gè)數(shù)小于1000的連通區(qū)域,在檢測出運(yùn)動(dòng)人體區(qū)域的同時(shí)也能夠得到運(yùn)動(dòng)人體的數(shù)目�。最后提取的運(yùn)動(dòng)人體區(qū)域如圖8所示�。
5 結(jié)束語
本論文在對(duì)運(yùn)動(dòng)人體檢測過程中提取的圖象進(jìn)行圖像差分、二值化、形態(tài)學(xué)濾波��、連通分量提取等處理;對(duì)相鄰兩幀視差圖進(jìn)行差分運(yùn)算,并二值化差分圖像;然后采用形態(tài)學(xué)濾波處理二值圖像中的孤立孔洞�、隨機(jī)噪聲點(diǎn)以及斷裂邊緣等;最后進(jìn)行連通分量提取,并去掉一些較小的連通區(qū)域,從而得到準(zhǔn)確的運(yùn)動(dòng)人體區(qū)域,完成運(yùn)動(dòng)人體檢測,實(shí)驗(yàn)驗(yàn)證表明,該方法可以獲得準(zhǔn)確的運(yùn)動(dòng)人體檢測結(jié)果,并在檢測精度和檢測速度之間取得了平衡。
參考文獻(xiàn):
[1] D M LI,L SHEN,D G Xie,et al. Camera linear calibration algorithm based on features of calibration plate. Proceedings of the 2012 2nd International Conference on Electric and Electronics[C],Sanya,2012.Berlin,Springer Verlag Press:689-697.
[2] S M SMITH,J M BRADY.SUSAN-a new approach to low level image processing[J].International Journal of Computer Vision,1997,23(1):45-78.
[3] P ROUSSEEUW,B DANIELS,A Leroy.Applying robust regression to insurance[J].Insurance Mathematics & Economics,1984,3(1):67-72.
[4] 顏宇甲.多Agent近化算法在圖像分割中的應(yīng)用研究[M]. 西安: 西安石油大學(xué),2011.
[5] 徐俊成.基于機(jī)器視覺的精密注塑零件的識(shí)別與檢測[M] .北京: 北京化工大學(xué), 2011,16(2):34-39.
[6] 姜宏志, 趙慧潔, 梁宵月等.基于極線校正的快速相位立體匹配[J].光學(xué)精密工程,2011,19(10):2520-2525.