特殊對位應用主要是針對特殊工藝的產品定制開發的針對性應用流程。
本文的示意圖中,平臺端都在左側,非平臺端都在右側,特殊情況以標示為準(生產情況不一定)。
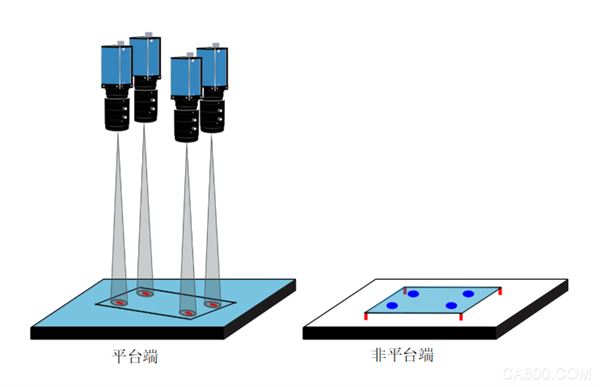
1.雙/三/四相機錯開對位應用
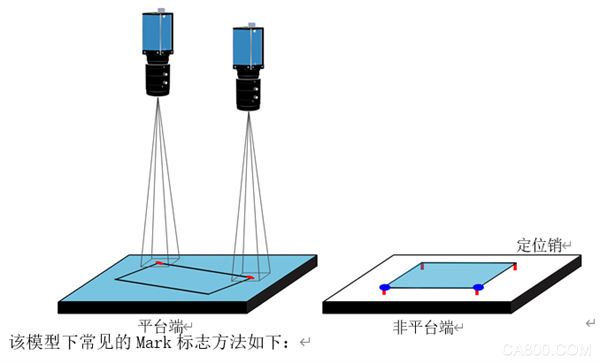
系統中可以使用兩個,三個或四個相機,每個相機都可以同時看到平臺端和非平臺端的對應Mark點(可以通過移動對位平臺,使得Mark點之間有一定的間隔,可以避免Mark點之間干涉)。

該模型下常見的Mark標志方法如下(以雙相機錯開對位模型Mark為例):

說明:如上圖所示,以雙相機錯開對位模型為例。錯開對位模型近似于映射對位模型。相同點是平臺端和非平臺端的產品都是不固定的,區別是映射對位需要平臺端和非平臺端各有一組相機,兩組相機通過映射關聯起來,錯開對位模型中,每個相機都能同時拍攝到平臺端和非平臺端產品的相應Mark點。得到Mark點后。根據糾偏算法找到偏移量,根據偏移量將平臺端的產品貼到非平臺端上。

糾偏方法:如上圖所示,以雙相機錯開對位為例,糾偏方法同四Mark映射對位。以兩個Mark連線的角度作為θ,兩Mark的中間點坐標作為(x,y);同樣道理,三相機錯開對位糾偏方法同六Mark映射對位;四相機錯開對位映射方法同8相機映射對位。
應用場景:這種對位模型原理上與映射對位相似,但是不需要相機映射,精度可以達到更高。常用在邦定機設備上。除邦定機外,大部分設備受安裝空間等原因限制,不能做到一個相機拍攝到兩個產品的Mark,不能使用這種模型。
適用產品:結構上能實現拍攝要求的產品
適用尺寸:小尺寸
精度:±0.02mm
2.兩相機手表貼合應用
針對圓形手表應用,系統中有兩個相機,定位方式:1.圓心定XY+圓心上的Mark定角度;2.圓心定XY+圓上的弦定角度。(需要建立映射關系)
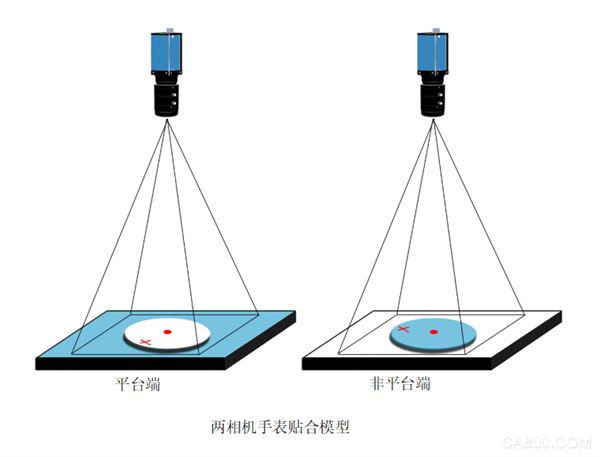
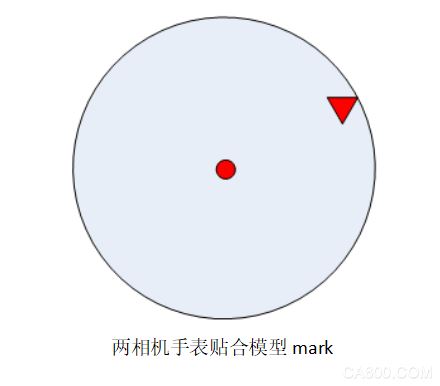
該模型下常見的Mark標志方法如下(以圓心定XY+圓心上的Mark定角度為例):
說明:如上圖所示,兩相機手表貼合模型是專門針對圓形產品的應用。類似于四Mark映射對位模型。相同點是平臺端和非平臺端的產品都是不固定的,都是通過四個Mark點定位。區別是四Mark映射對位是針對矩形產品,兩相機手表貼合模型專門針對圓形產品。得到Mark點后。根據糾偏算法找到偏移量,根據偏移量將平臺端的產品貼到非平臺端上。

糾偏方法:如上圖所示,以圓心定XY+圓心上的Mark定角度為例。擬合圓找到圓心最為(x,y),圓心與特征Mark之間的連線角度為θ。
適用產品:專用于圓形產品貼合,例如圓形手表
適用尺寸:小尺寸
精度:±0.05mm
3.Fast雙Mark自對位應用
根據客戶要求,參考法視特對位軟件做的應用,目前不用。
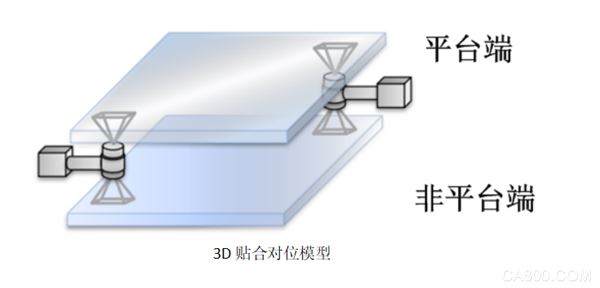
4.3D貼合對位應用
專門針對手機玻璃3D膜片貼付。
該模型下常見的Mark標志方法如下(類似錯開對位)
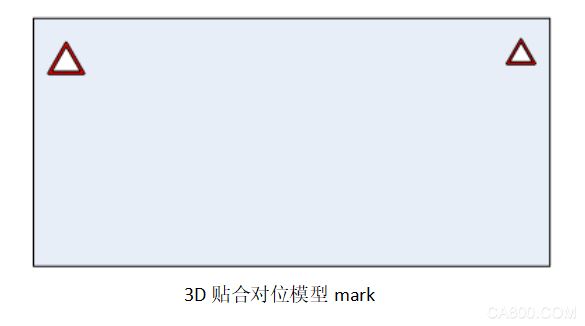
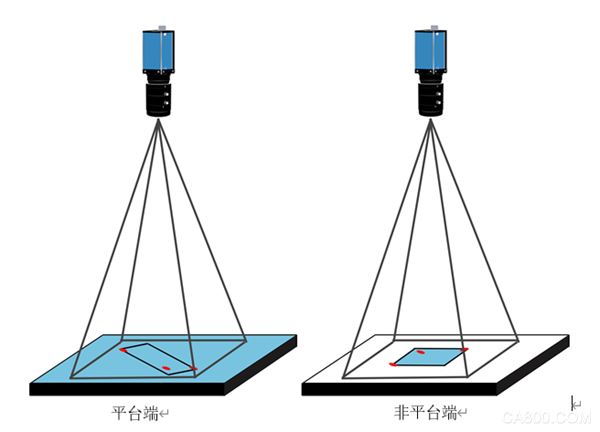
說明:如上圖所示,3D貼合對位有幾種固定的抓Mark方法。上圖的所示方法與雙相機錯開對位相似。平臺端和非平臺端的產品都是不固定的,每個相機通過棱鏡鏡頭,能同時拍攝到平臺端和非平臺端產品的相應Mark點。得到Mark點后。根據糾偏算法找到偏移量,根據偏移量將平臺端的產品貼到非平臺端上。
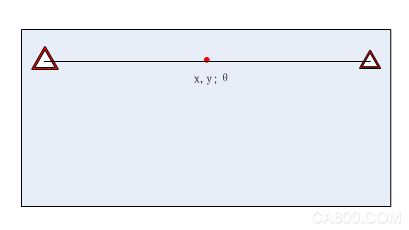
糾偏方法:如上圖所示,3D貼合對位模型有幾種固定的抓Mark方法。以上圖的方法為例。以兩個Mark連線的角度作為θ,兩Mark的中間點坐標作為(x,y)。
應用場景:適用于精度要求較高的項目,如3D貼合
適用產品:玻璃+拉絲模(3D貼合)
適用尺寸:小尺寸
精度:±0.02mm
5.雙Mark熱熔機疊板應用
針對PCB疊板熱熔應用,系統中有兩個相機,定位原理方式與“雙相機自對位”類似,目標位置ORG的坐標為相機中心坐標,以及設置每層板的Mark 圓的 直徑值、容差、膨脹等功能,抓取圖像方式上同時適應抓取大小不一的圓Mark。
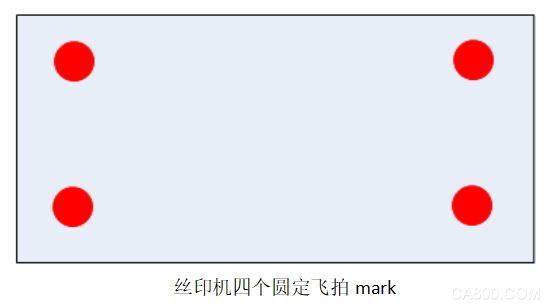
6.絲印機四個圓定飛拍
定位方式與四Mark自對位應用基本相同,系統一個相機,四通道抓取四個圓心來定位XYR。
該模型下常見的Mark標志方法如下(類似四Mark自對位):
說明:非平臺端上的產品通過定位銷或其他方式確保來料都是在相對固定的位置,平臺端的產品來料位置不固定,找出四個交點后,根據糾偏算法找到偏移量,根據偏移量將平臺端的產品貼到非平臺端上。
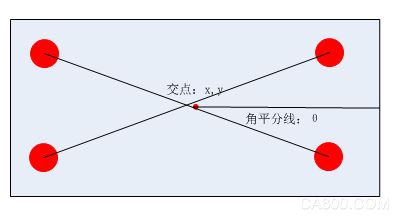
糾偏方法:如上圖所示,類似單目四Mark,區別在于單目四Mark是以矩形角點作為Mark點,絲印機四個圓定飛拍是以圓心作為Mark點。
應用場景:絲印機
適用產品:較大產品
適用尺寸:>200mm
精度:±0.05mm