1、 硬件布置
相機的安裝方向:以操作者站立調試的位置為基準(一般就是顯示器的位置),相機的螺絲孔面朝向操作者,標簽面(即正面)遠離操作者。這樣才能保證實際圖像和顯示器圖像保持一致性,方便調試。

機械手的安裝方向:以操作者站立調試的位置為基準(一般就是顯示器的位置),以雅馬哈四軸SCARA機械手為例,機械手的安裝方向如下:

2、軟件權限的登陸
①點擊軟件左上角的“橙色圖標”,點擊“用戶”進入用戶設置界面;

②在用戶管理界面,輸入供應商權限密碼:“310525”,點擊“用戶登陸”,進入軟件管理權。

③只有登陸權限,才可以設置軟件參數,修改產品模板,非登陸狀態,不能更改以上數據。
3、 產品換型
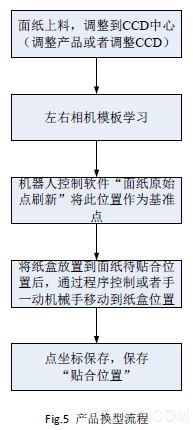
3.1、面紙上料,調整到CCD中心
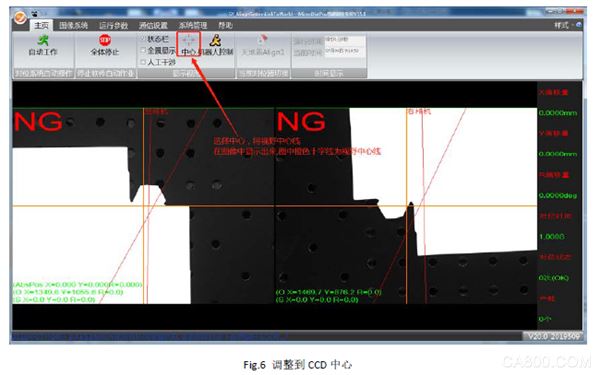
軟件上點擊中心,在圖像中可以看到橙色的十字線,這個為視野中心,在面紙上料過程中,我們需要將面紙的特征點放置到橙色十字交點即視野中心位置。
3.2、左右模板學習
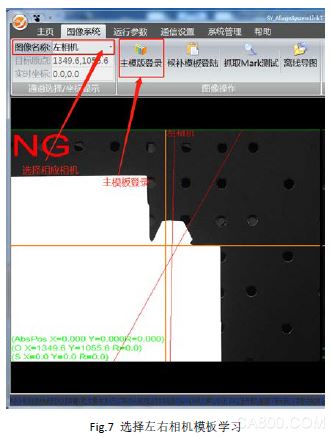
如圖7所示,通過“通道名稱”處選擇我們要進行模板學習的“左相機”,然后進行“主模板登錄”進行左相機模板學習。

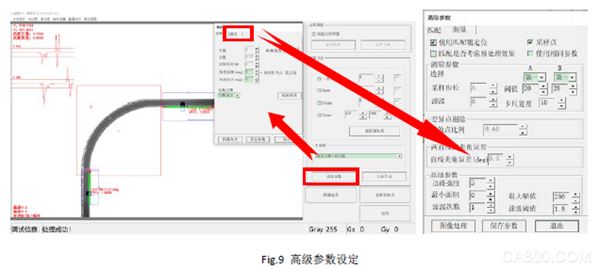
使用匹配粗定位:
抓邊工具位置是否需要關聯匹配粗定位的坐標結果,默認勾選
匹配是否考慮預處理:
采用模板匹配結果來定位抓邊工具時,是否需要使用預處理后的圖像做匹配粗定位,默認不勾選
使用相同參數:
抓邊工具的閾值參數分開設定還是使用相同的參數,默認勾選
采樣步長:
卡尺工具間距,一般設置為卡尺寬度的1/2,這樣目標邊邊緣的采樣點就不會遺漏
閾值:
黑白灰階過度的門限值,默認值20
濾波:
濾除圖像中的噪聲,默認值為0。目前這個參數不建議使用
卡尺寬度:
卡尺工具的寬度,例如卡尺寬度是10代表會在是個像素點的寬度范圍內取到一個有效點。默認值為10
有效點比例:
有效點的上限值,默認值為0.5
聚類:
該功能不建議使用,默認為不勾選
直線夾角誤差:
直線夾角誤差(與90比較)的上限
邊緣強度:
周圍象素灰度有階躍變化的那些象素的集合,例如設置為3代表軟件會用相鄰3個像素的灰階進行比較得出一個像素跳變的像素點。這種方式求出的像素跳動點相對穩定一下。默認值為3
濾波次數:
執行濾波的次數,默認值為1
濾波強度:
執行濾波的強度,默認值為1.8,值越小濾波強度越大
要根據雙直線來抓取面紙上定位的Mark點,程序中我們設定雙直線的夾角為90度,誤差默認為5度,所以雙直線夾角在(85度,95度)范圍內都屬于正常。但我們做的面紙的實際夾角較小,所以我們需要將直線夾角誤差設置得大一些,比如我們設置直線夾角誤差為84.5度,那么雙直線的夾角在(5.5度,174.5度)這個范圍內我們都認為是合理的。保證能夠抓取到面紙兩條邊形成的交點。
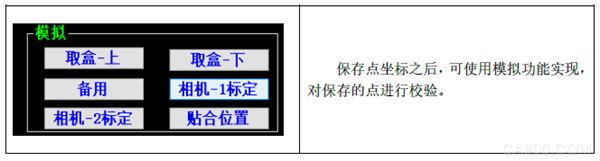
3.3、機器人-面紙原始點刷新
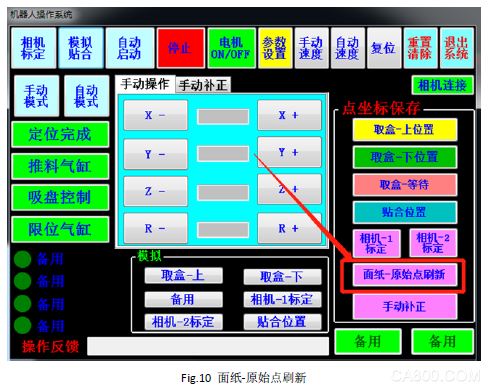
面紙-原始點刷新功能主要是設定面紙的基準位置。
3.4、保存貼合位置

將機械手移動到貼合的位置,將此位置保存為貼合位置。
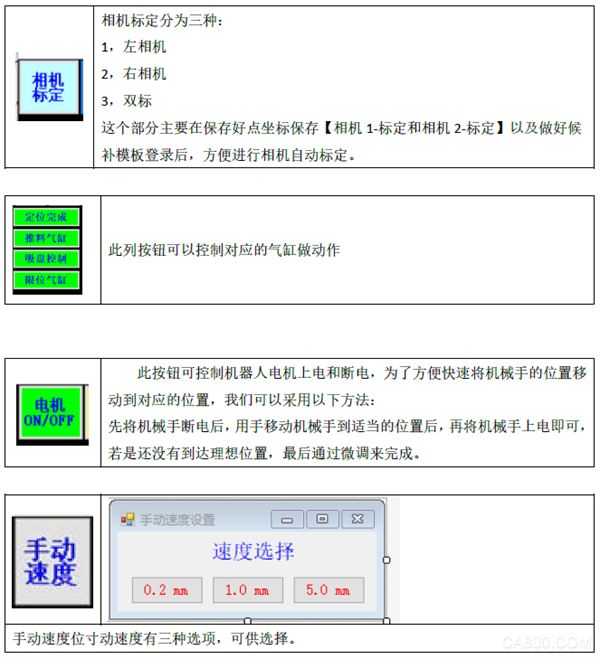
4、相機自動標定
相機自動流程主要是將兩顆相機和機械手建立關系。

4.1、調整標定模板到視野中心

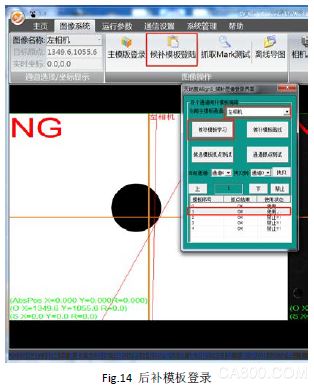
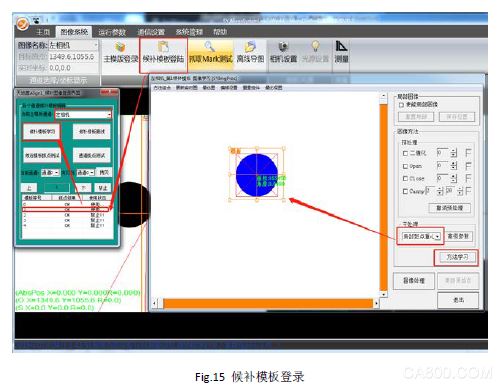
4.2、候補模板登錄進行圖像學習
候補模板登錄方法如下所示:
標定應用說明:
機械手吸起標定板,將圓形Mark移動到圖像視野中心。
標定的圖像學習,使用后補模板登錄如左圖所示,選中序號1,然后進行圖像學習。
序號0為主模板,序號1為我們選擇的候補模板。
標定的圖像學習,使用后補模板登錄如左圖所示,選中序號1,然后進行圖像學習。
標定板學習方法為:“局部斑點重心”

相機標定,通過機器手平臺自動完成相機和平臺的關系建立,特別方便客戶換型,用戶只需要1分鐘即可完成標定。
4.3、保存相機1和相機2標定位置

機械手吸起標定板,移動到左相機即相機1的視野中心,進行圖像學習后,鼠標左鍵點擊“相機-1標定”進行左相機標定位置點位的保存。同樣方法將機械手吸起標定板移動到右相機視野中心位置時候,再進行“相機-2標定”保存右相機的標定位置點位。
4.4、相機自動標定

執行左上角“相機標定”后,分別進行相機1和相機2的自動標定,此過程主要目的是將相機坐標系和機械手坐標系關聯到一起。
5、機器人控制軟件

機器人控制軟件主要用于輔助進行機械手的簡單功能調試。主要功能以模式分為兩部分,自動模式和手動模式。
具體功能:
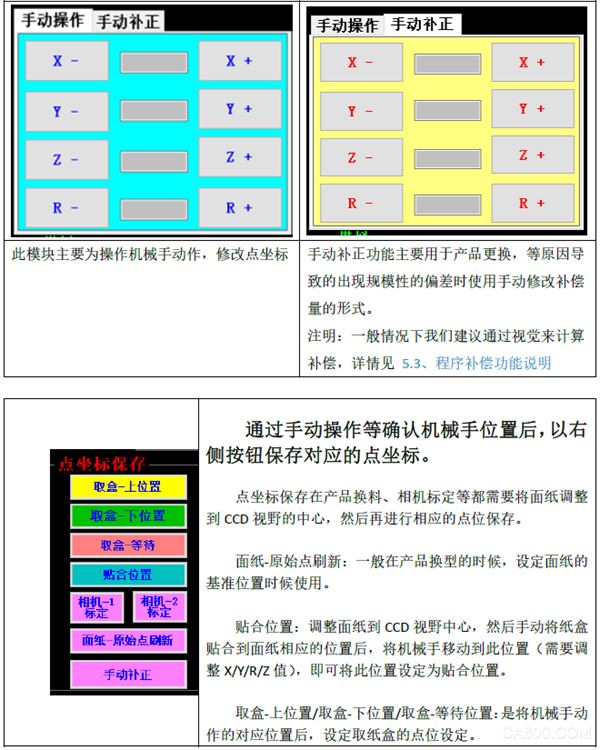
5.1、手動模式
手動模式下可以使用的功能如下:
5.2、自動模式
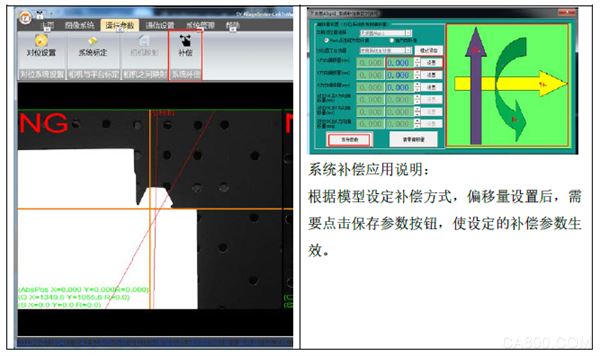
5.3、程序補償功能說明
