“運(yùn)行參數(shù)”設(shè)置界面如圖所示:
A. 對位設(shè)置:設(shè)置對位相關(guān)參數(shù)。
B. 系統(tǒng)標(biāo)定:啟動標(biāo)定與結(jié)果查詢。
C. 相機(jī)映射:對位系統(tǒng)映射。
D. 補(bǔ)償:對位系統(tǒng)補(bǔ)償操作。
對位系統(tǒng)設(shè)置界面
在“運(yùn)行參數(shù)”->點(diǎn)擊“對位設(shè)置”彈出對位系統(tǒng)界面,如圖所示:
A. 拍照延時(shí):生產(chǎn)過程中收到 PLC/Robot 發(fā)送拍照信號后,延時(shí)一段時(shí)間再執(zhí)行拍照采集圖像動作;
標(biāo)定延時(shí):標(biāo)定過程中收到 PLC/Robot 發(fā)送拍照信號后,延時(shí)一段時(shí)間再執(zhí)行拍照采集圖像動作。
B. XY 對位精度:X 方向/Y 方向精度上限,即視覺當(dāng)前對位 X 方向/Y 方向偏移量判定值小于設(shè)定值才會輸出對位 OK;
R 對位精度:角度精度上限,即視覺對位角度精度偏移量判定值小于設(shè)定值才會輸出對位 OK。
C. XY 標(biāo)定步距:標(biāo)定過程中對位平臺 X 方向/Y 方向移動的距離;
R 標(biāo)定步距:標(biāo)定過程中對位平臺旋轉(zhuǎn)方向移動的角度;
D. XY 最大偏移量:對位過程中對位平臺 X 方向/Y 方向最大可以移動的距離;
R 最大偏移量:對位過程中對位平臺旋轉(zhuǎn)方向最大可以移動的角度。
E. 多次對位檢測精度:勾選后對位方式變?yōu)椤芭恼?>對位->拍照復(fù)檢”循環(huán)。不勾選對位方式變?yōu)椤芭恼?>對位”循環(huán);
靶標(biāo)搜索設(shè)置:點(diǎn)擊進(jìn)入如下圖所示界面:(
注釋:此功能應(yīng)用于相機(jī)抓取圖像中 Mark,并計(jì)算當(dāng)前與相機(jī)中心坐標(biāo)的差值,并將此差值發(fā)送給外部 PLC 等控制端控制相機(jī)移動軸移動,實(shí)現(xiàn) Mark 在相機(jī)視野中心坐標(biāo))
a. 相機(jī)選擇:選擇當(dāng)前需要操作的相機(jī)序號;
b. 參數(shù)設(shè)置:X/Y 定位取反/XY 定位互換:根據(jù)相機(jī)軸的定義運(yùn)動方向, 如果視覺發(fā)送的偏移量方向與 PLC 等控制端方向相反時(shí),可勾選 “取反”已達(dá)到同向操作。
使用標(biāo)定像素精度:發(fā)送的偏移量為物理單位 mm,此功能為是否使用根據(jù)相機(jī)的標(biāo)定信息的像素精度(像素精度*像素當(dāng)量=物理距離)發(fā)送給 PLC 等控制端;
手動設(shè)置像素精度:勾選此功能后,手動輸入相機(jī)的像素精度值,像素精度 = 相機(jī)物理距離/相機(jī)像素長度(長邊或者短邊);
通過九宮格標(biāo)定結(jié)果:系統(tǒng)默認(rèn)標(biāo)定為五點(diǎn)標(biāo)定,勾選此選項(xiàng)即為九宮格標(biāo)定。(功能待完善)
對位次數(shù)(次)/999 表示不使用次數(shù)限定:設(shè)定值代表對位次數(shù)上限, 當(dāng)次對位次數(shù)如果達(dá)到設(shè)定值,還沒有達(dá)到對位精度設(shè)定值,則系統(tǒng)判定當(dāng)前對位為 NG;
注釋:
1.對位次數(shù)設(shè)置為 1,勾選/或者不勾選“多次對位檢測精度”,對位方式為只會對位一次輸出偏移量以及對位 OK 不檢測精度;
2.對位次數(shù)設(shè)置為 2 或者 2 以上,勾選“多次對位檢測精度”,對位方式為 “拍照->對位->拍照復(fù)檢”循環(huán),在對位次數(shù)內(nèi)達(dá)到設(shè)定精度,對位結(jié)束輸出
OK 。 超 過 對 位 次 數(shù) 未 達(dá) 到 精 度 , 對 位 結(jié) 束 輸 出 NG; 3.對位次數(shù)設(shè)置為 2 或者 2 以上,不勾選“多次對位檢測精度”,對位方式
為“拍照->對位->拍照復(fù)檢”循環(huán),在對位次數(shù)內(nèi)達(dá)到設(shè)定精度,對位結(jié)束輸出
OK。超過對位次數(shù)未達(dá)到精度,對位結(jié)束輸出 OK。
F. 對位系統(tǒng)高級參數(shù)設(shè)置:當(dāng)“設(shè)置軟件”勾選啟動“啟動 Mark 間距檢測” 時(shí),用來管控產(chǎn)品相鄰的兩個(gè) Mark 距離來料公差,如下圖所示:

a. Sample 產(chǎn)品:(對位平臺上的產(chǎn)品)對位系統(tǒng)會對拍照通道的 Mark
點(diǎn)與 Mark 點(diǎn)距離進(jìn)行測量,間距代表 Mark 點(diǎn)之間的距離,容差代表
Mark 點(diǎn)之間距離的容差。例如設(shè)定 Mark 點(diǎn)距離設(shè)定為 100,容差設(shè)定為 10,即對應(yīng)通道 Mark 點(diǎn)距離不在 90~110 之間代表測試 Mark 距
離超限,系統(tǒng)會輸出距離超限報(bào)警。這樣可以有效管控產(chǎn)品來料誤差, 提升對位精度;
b. ORG 產(chǎn)品:(非對位平臺上的產(chǎn)品)原理同 Sample 產(chǎn)品。
標(biāo)定結(jié)果
在“運(yùn)行參數(shù)”->點(diǎn)擊“系統(tǒng)標(biāo)定”,彈出標(biāo)定結(jié)果界面,如下圖所示:
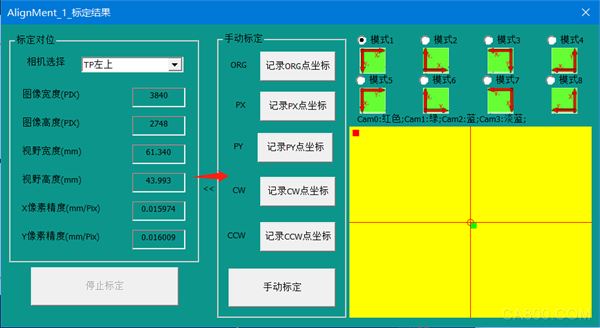
A. 相機(jī)選擇:標(biāo)定主要是針對拍攝對位平臺上產(chǎn)品的圖像通道;
B. 圖像寬度:標(biāo)定通道相機(jī)長邊方向像素分辨率;
C. 圖像高度:標(biāo)定通道相機(jī)短邊方向像素分辨率;
D. 視野寬度:顯示五點(diǎn)標(biāo)定后標(biāo)定通道相機(jī)視野長邊方向長度;
E. 視野高度:顯示五點(diǎn)標(biāo)定后標(biāo)定通道相機(jī)視野短邊方向長度;
F. X 像素精度:標(biāo)定通道相機(jī)長邊方向像素精度 = 視野寬度/圖像寬度;
G. Y 像素精度:標(biāo)定通道相機(jī)短邊方向像素精度 = 視野高度/圖像高度;
注釋:標(biāo)定計(jì)算出來的視野寬,高要和實(shí)際視野接近,否則標(biāo)定結(jié)果就是錯(cuò)誤的, 另外 X 像素精度和 Y 像素精度要接近,否則標(biāo)定結(jié)果就是錯(cuò)的。
系統(tǒng)映射流程
在“運(yùn)行參數(shù)”->點(diǎn)擊“相機(jī)映射”,彈出相機(jī)映射界面,如下圖所示:

A. 手動映射的流程操作:
第一次映射:勾選“第一次映射”,勾選通道名稱后面的“白色小正方形”,點(diǎn)擊按鈕“0”手動抓取 Mark 并記錄,當(dāng)抓取 Mark 成功時(shí),“白色小正方形”的勾選狀態(tài)會復(fù)位,當(dāng)抓取 Mark 失敗時(shí),“白色小正方形”的勾選狀態(tài)不會復(fù)位,其他通道類似;
第二次映射:勾選“第二次映射”,抓取 Mark 方式與第一次映射雷同; 兩次映射抓取 Mark 都成功后,點(diǎn)擊“手動映射”按鈕,系統(tǒng)會計(jì)算映射結(jié)
果并保存數(shù)據(jù)。
轉(zhuǎn)換測試:勾選“轉(zhuǎn)換測試”,抓取 Mark 方式與第一次映射雷同; 抓取 Mark 都成功后,點(diǎn)擊“手動測試”按鈕,系統(tǒng)會計(jì)算轉(zhuǎn)換測試結(jié)果,
可通過“查詢結(jié)果”按鈕來查看轉(zhuǎn)換結(jié)果。最后點(diǎn)擊“保存參數(shù)”按鈕保存相關(guān)數(shù)據(jù);
B. 映射數(shù)據(jù)拷貝:可以在不同對位器之間進(jìn)行映射數(shù)據(jù)拷貝。例如系統(tǒng)中一共用到兩個(gè)對位器,并且兩個(gè)對位器的運(yùn)動執(zhí)行機(jī)構(gòu)完全相同,就可以進(jìn)行對位器之間映射數(shù)據(jù)拷貝;
C. 自動映射/轉(zhuǎn)換數(shù)據(jù)測試:將上述手動操作流程使用自動程序執(zhí)行。啟動第一次映射/第二次映射流程時(shí),先點(diǎn)擊“啟動映射”按鈕(啟動后按鈕會變灰色),PLC 再發(fā)送拍照流程,兩次映射流程結(jié)束后(按鈕恢復(fù)狀態(tài),如果中途有拍照失敗也會恢復(fù)狀態(tài),且映射 NG 需要重新再來),映射數(shù)據(jù)系統(tǒng)會自動保存。再啟動“轉(zhuǎn)換測試”,PLC 再發(fā)送拍照流程,流程結(jié)束后,會彈出一個(gè)轉(zhuǎn)換測試數(shù)據(jù)。
系統(tǒng)補(bǔ)償參數(shù)對話框
在“運(yùn)行參數(shù)”->點(diǎn)擊“補(bǔ)償”,彈出補(bǔ)償界面,如下圖所示:
A. 當(dāng)前對位器選擇:當(dāng)系統(tǒng)開啟多個(gè)對位器時(shí),選擇當(dāng)前需要操作的對位器;
B. 補(bǔ)償方式:系統(tǒng)支持兩種補(bǔ)償方式,Mark 點(diǎn)連線補(bǔ)償和軸方向補(bǔ)償。
1. Mark 點(diǎn)連線補(bǔ)償:X 補(bǔ)償方向?yàn)槠叫杏?Mark 點(diǎn)連線方向,Y 補(bǔ)償方向?yàn)榇怪庇?Mark 點(diǎn)連線方向,R 補(bǔ)償方向?yàn)橐詫ξ黄脚_旋轉(zhuǎn)中心為中心順時(shí)針或者逆時(shí)針旋轉(zhuǎn);
2. 軸方向補(bǔ)償:X 補(bǔ)償方向?yàn)槠叫杏谄脚_電機(jī) X 方向,Y 補(bǔ)償方向?yàn)槠叫杏谄脚_電機(jī) Y 方向,R 補(bǔ)償方向?yàn)槠脚_電機(jī)旋轉(zhuǎn)方向。
C. 對位器工位選擇:當(dāng)前對位器選擇使用多組補(bǔ)償時(shí),選擇操作的補(bǔ)償組數(shù);
D. 模式設(shè)定:點(diǎn)擊進(jìn)入“參數(shù)設(shè)置”界面,選擇當(dāng)前的對位模式。如下圖所示:
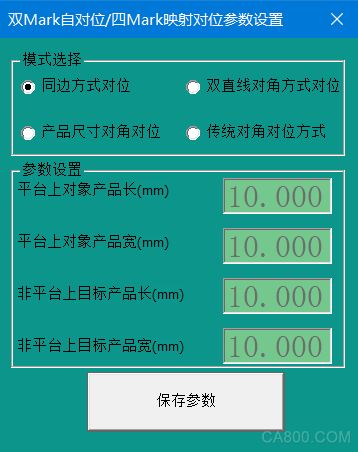
a. 同邊對位對位:產(chǎn)品對位基準(zhǔn)為兩個(gè)相鄰的靶標(biāo) Mark;
b. 雙直線對角方式對位:產(chǎn)品對位基準(zhǔn)為兩個(gè)互為對角的靶標(biāo) Mark, 且抓取 Mark 的圖像學(xué)習(xí)方法為“雙直線”工具。
c. 產(chǎn)品尺寸對角對位:產(chǎn)品對位基準(zhǔn)為兩個(gè)互為對角的靶標(biāo) Mark,需要在下方“參數(shù)設(shè)置”區(qū)域?qū)懭氘a(chǎn)品在長寬數(shù)值,長方向?yàn)橄鄼C(jī)的 X 方向的產(chǎn)品長度方向。
d. 傳統(tǒng)對角對位方式:產(chǎn)品對位基準(zhǔn)為兩個(gè)互為對角的靶標(biāo) Mark。
E. XYR 方向偏移量:三個(gè)方向/軸補(bǔ)償量設(shè)置方法為:在補(bǔ)償值后面的輸入框中輸入當(dāng)前要補(bǔ)償?shù)牧浚较蚩梢詤⒖加覀?cè) G 圖;
F. 對位 OK 后 XYR 方向偏移量:即對位 OK 后,可以根據(jù)產(chǎn)品最終放置的位置設(shè)定補(bǔ)償?shù)?XYR,方向可以參考 D 圖;
G. 補(bǔ)償方向示意圖:可以根據(jù)客戶補(bǔ)償習(xí)慣進(jìn)行選擇對應(yīng)圖片位置,圖片設(shè)置更換在“設(shè)置軟件”內(nèi)操作;
H. 保存參數(shù):補(bǔ)償設(shè)定完后點(diǎn)擊保存參數(shù),系統(tǒng)會將補(bǔ)償值寫入文檔保存;
I. 清零偏移量:系統(tǒng)會把所有的偏移量全部設(shè)置為 0,清零后系統(tǒng)不會自動將補(bǔ)償值寫入文檔,需再次點(diǎn)擊“保存參數(shù)”按鈕即可。