應(yīng)用介紹
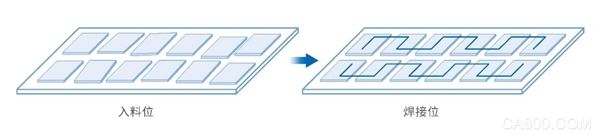
匯流帶焊接機是組件段中的設(shè)備,前道工序為串焊機,串焊好的多組電池串排列好輸送至匯流焊接機,通過視覺傳感器進行整列糾偏對齊后,使用焊帶將電池串之間連接,實現(xiàn)多組電池串的電流匯流,形成完整的電池組件,再提供給下道設(shè)備進行封裝。
課題
1、節(jié)拍難以提升
目前國內(nèi)設(shè)備節(jié)拍基本處于21秒以上,客戶期望突破18秒,增加業(yè)內(nèi)競爭力。
2、缺陷位置定位
需要實現(xiàn)大尺寸成品缺陷位置的精準定位。
解決方案
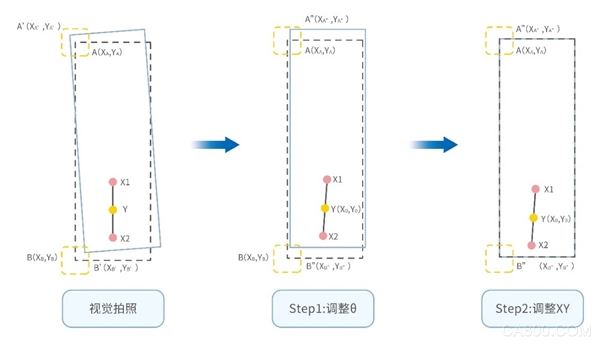
1、一次對位糾偏技術(shù)
通過一次對位糾偏技術(shù),將原先的2次拍照,2次糾偏,優(yōu)化為1次拍照,2次糾偏,減少機械手升降次數(shù),大大提升設(shè)備節(jié)拍。

糾偏優(yōu)化對比圖
通過一次拍照獲得的數(shù)據(jù)進行處理,分別計算得出角度糾偏值,及角度糾偏后帶來的XY二次偏移值,按糾偏結(jié)構(gòu)進行動作分解后,依次進行角度糾偏,與XY糾偏。
2、飛拍技術(shù)
通過飛拍技術(shù),嚴格按照位移間隔進行拍照,并且無需停止機械手臂的運動,縮短運動周期,提高工作效率。
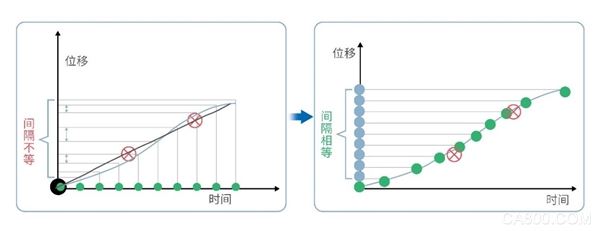
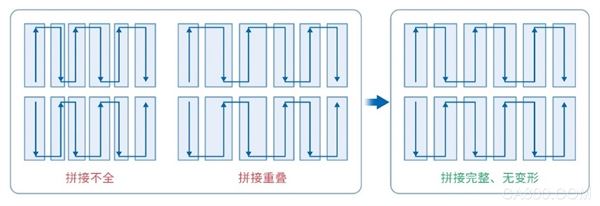
由于拍攝位置穩(wěn)定,不用考慮拍攝位置的偏差,能擴大對象物進行拍攝,強化像素分辨能力,提高檢查精度,因而保證缺陷位置的準確,以及圖像拼接的準確性。
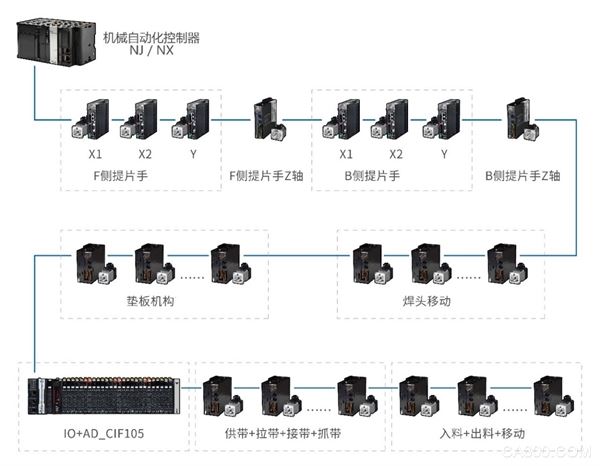
系統(tǒng)配置
實現(xiàn)價值
1、生產(chǎn)節(jié)拍:單個產(chǎn)品節(jié)拍<18秒
2、定位精度:缺陷位置定位精度 0.1mm
客戶的心聲
目前國內(nèi)太陽能電池匯流帶焊接機節(jié)拍基本處于21秒以上,再向上提速的話,則會影響定位精度以及最終成型品質(zhì)。通過歐姆龍精密控制系統(tǒng)的導入,加之內(nèi)部算法的優(yōu)化,成功打破效率瓶頸,在保障精度的前提下達到18秒以內(nèi),為追求業(yè)內(nèi)最高性能邁出重要的一步。
3個“i”掀起制造革新

如果您對本案例感興趣,歡迎掃碼或點擊閱讀原文提交您的需求信息,歐姆龍工程師將與您取得聯(lián)系。

更多詳情請點擊了解
