許鵬鵬1,嚴婷婷2,高紅梅1,趙 強1
(1.江蘇科技大學,江蘇 鎮江 212003;2.江蘇鎮安電力設備有限公司,江蘇 鎮江 212000)
摘 要:鋪管船在海洋油氣開發過程中有著廣泛的應用前景,隨著鋪管船技術的發展和功能的完善,對于鋪管船動力定位系統的研究和應用也顯得越來越重要。本文在動力定位系統功能的基礎上,構建了整個系統的硬件框架和網絡結構,并且介紹了串口信號的采集方法與解析協議,希望能為鋪管船動力定位系統的設計提供一定參考。
關鍵詞:鋪管船;動力定位系統;硬件框架;串口信號
中圖分類號:TP29 文獻標識碼:B 文章編號:1003-7241(2013)06-0049-05
1 引言
我國是沿海國家,擁有漫長的海岸線與300多萬平方公里的遼闊海域,其中蘊藏著豐富的海底油氣資源[1]。在對這一資源進行開發的過程中,海上油氣田開采出的油氣除少數在海上直接裝船外運,其余多數則需要通過管道轉輸至陸地加工并分別輸送到用戶。隨著石油天然氣開發進程的不斷深入,海洋管道的作用則越顯重要,因此對于海洋管道鋪設的專用設備——鋪管船的關注度也在不斷提高[2]。鋪管船是用于海底管道鋪設的專用大型海洋工程船舶,在海底輸油管道、海底輸氣管道、海底輸水管道的鋪設方面有著重要作用[3]。
近年來,隨著船舶建造水平的深入提高以及新技術的廣泛應用,鋪管船的發展也取得了很大進步。從采用錨泊定位、作業水深僅300m以內的淺水鋪管船,發展到采用動力定位技術、能滿足3000m以內作業水深的深海作業鋪管船[1]。隨著海上油氣生產向深海的進一步發展,動力定位系統在鋪管船上的應用必將得到更多重視和發展。
動力定位系統是一種閉環的控制系統,其采用推力器來提供抵抗風、浪、流等作用在船上的環境力,從而使船盡可能地保持在海平面上要求的位置上,其定位成本不會隨著水深增加而增加,并且操作也比較方便[4]。本文著手于鋪管船動力定位系統的研究,旨在實現鋪管船動力定位的功能,主要設計了一種鋪管船動力定位系統的硬件框架,并且在此基礎上介紹了串口信號的采集方法。
2 全船控制網絡設計
作為鋪管船上的一個子系統,動力定位系統也是為全船的鋪管施工作業而服務,在對其進行研究之前,就必須要先了解鋪管船的全船控制系統。該系統由駕駛室PLC控制系統、SCADA系統、艏艉液壓PLC控制系統、計算機網絡和推進控制系統等所組成,鋪管船的全船控制網絡結構如圖1所示。
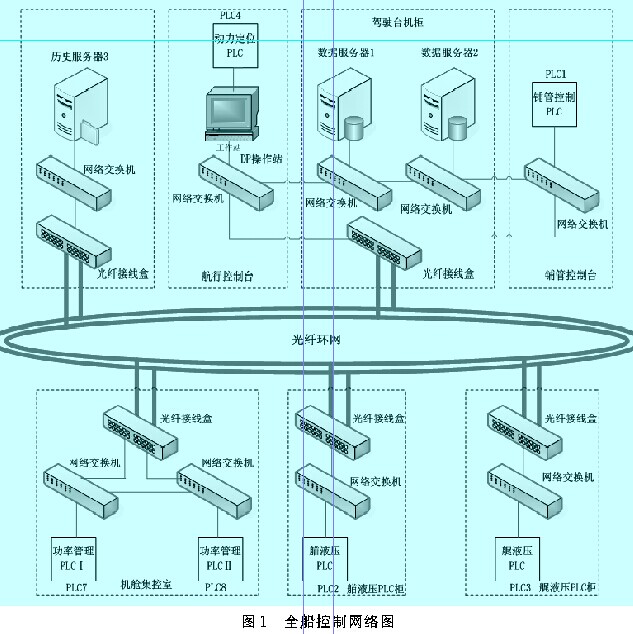
必須要先了解鋪管船的全船控制系統。該系統由駕駛室PLC控制系統、SCADA系統、艏艉液壓PLC控制系統、計算機網絡和推進控制系統等所組成,鋪管船的全船控制網絡結構如圖1所示。
其中,駕駛臺機柜中的兩臺服務器互為冗余備份,當其中一臺出現運行故障時,另外一臺備用服務器則會自動投入使用,而歷史服務器則承擔著歷史數據與報表的查詢等功能。在鋪管控制臺內的PLC1,艏液壓柜內的PLC2,艉液壓柜內的PLC3,以及航行控制臺內的PLC4,功率管理系統的冗余PLCI和PLCII分別負責采集不同的數據,各采集的PLC之間通過以太網進行通訊,服務器則通過OPC客戶端進行數據采集。鋪管控制臺內的PLC1主要用于實現作業過程中控制臺上所有的按鈕、開關、指示燈、操作手柄、儀表等的輸入輸出功能。
3 鋪管船動力定位硬件系統
鋪管船動力定位系統的設計目的主要在于整個系統的施工方案,只有系統功能的完善,才可以為動力定位系統提供具體的實施依據。動力定位系統作為鋪管船上的一個子系統,因此從全船角度出發,設計了動力定位系統的硬件框架與網絡結構[6]。
3.1 動力定位硬件系統設計
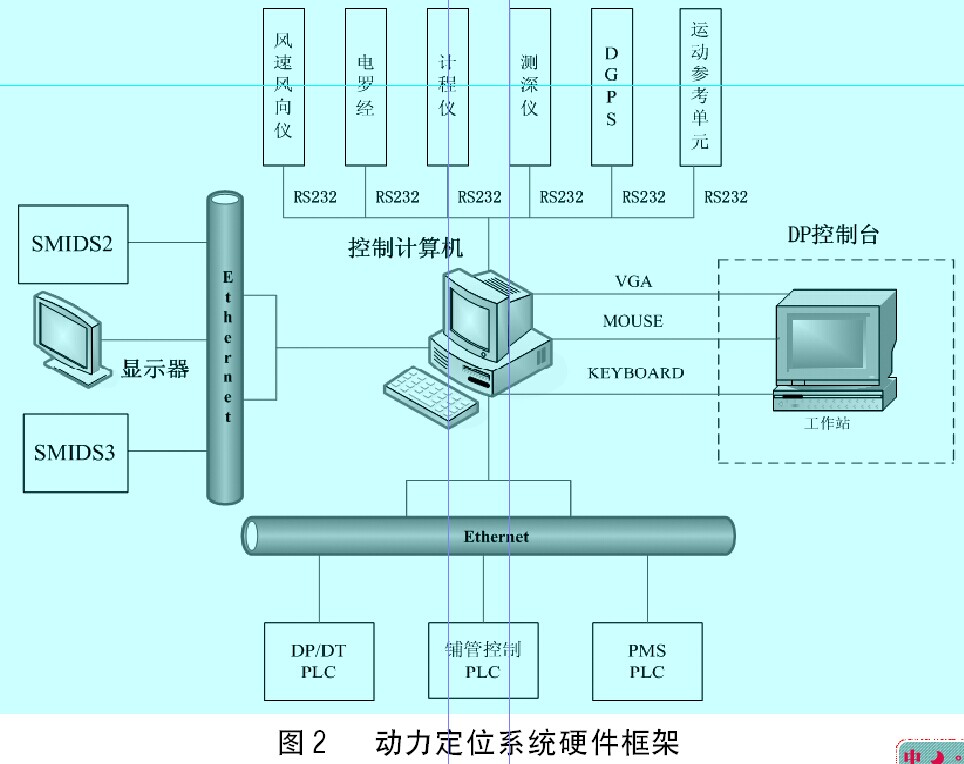
根據動力定位系統的結構組成及其在鋪管船上的具體功能,設計了如圖2的系統硬件結構。在系統硬件框架中,底層信號的采集通過各子系統的PLC,動力定位系統(DP)PLC、鋪管控制PLC、功率管理系統PLC則采用以太網進行通訊功能的連接;電羅經、風速風向儀、計程儀信號等則根據各自的信號格式RS422或RS485通過多串口卡轉換成RS232格式直接與控制計算機連接;DGPS、運動參考單元(MRU) 、測深儀等則通過網關將信號轉換成TCP/IP協議格式進行采集;控制計算機的液晶顯示器置于中央控制臺內,經過以太網進而連接兩臺SMIDS復視器,且分別裝置左右兩翼控制臺。
3.2 動力定位網絡系統設計
根據鋪管船對動力定位系統的需求,此處設計了一種鋪管船動力定位控制系統控制網絡的連接方式。其中包含了控制計算機、交換機、動力定位PLC、艏PLC、鋪管控制PLC、PROFIBUS通訊卡、多串口通訊卡、電羅經、風向風速儀、DGPS、運動單元、測深儀、計程儀和鋪管作業顯示系統。動力定位PLC和艏PLC、鋪管控制PLC通過網絡交換機進行連接,其中每個PLC都有各自唯一的IP地址;運動單元、電羅經、風向風速儀、DGPS、測深儀與計程儀等則通過多串口通訊卡和控制計算機進行連接;PLC通過PROFIBUS通訊卡和控制計算機進行連接;控制計算機與鋪管作業顯示系統則通過網絡交換機進行連接;PLC與控制計算機采用DP協議實現一對一的通訊,完全滿足了鋪管船動力定位控制系統需要的控制要求。同時鋪管船動力定位控制系統的控制網絡連接方式,能夠有效滿足鋪管船動力定位控制的特殊要求,其具體網絡形式如圖3所示。
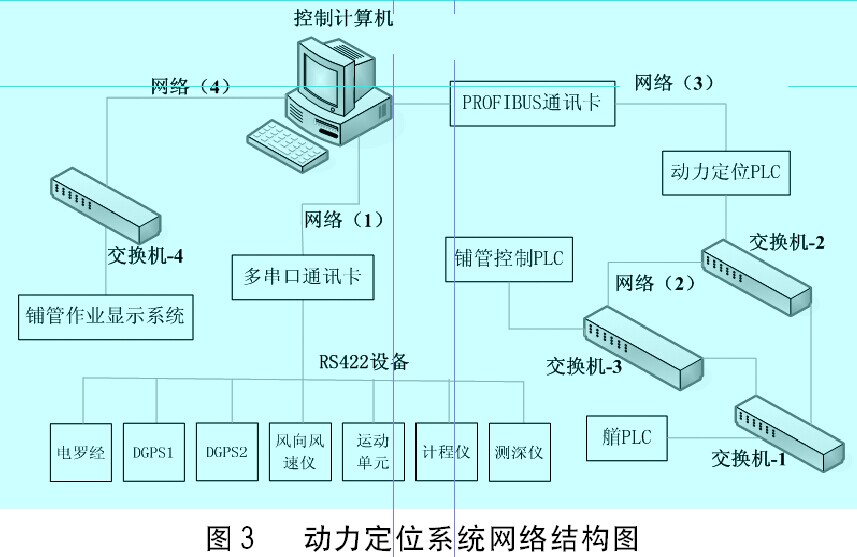
在該網絡結構中,包含了控制計算機、艏液壓PLC、鋪管控制PLC、動力定位PLC、交換機-1、交換機-2、交換機-3、交換機-4、PROFIBUS通訊卡、多串口通訊卡、DGPS1、DGPS2、電羅經、風向風速儀、測深儀、計程儀、運動單元與鋪管作業顯示系統;上述各部分連接成為一個完整的控制網絡,從而實現了對鋪管船的位置、艏向和作業軌跡的控制;其中動力定位PLC 用于實現對動力定位系統硬連線設備的輸入輸出控制(如作業線控制、艏推進控制、主推進控制、狀態報警等);動力定位PLC、鋪管控制PLC、艏液壓PLC通過網絡交換機構成環形網絡;動力定位PLC和控制計算機通過PROFIBUS通訊卡進行連接,PROFIBUS通訊卡插入控制計算機主板的PCI插槽;所述風向風速儀、DGPS1、DGPS2、運動單元、電羅經、測深儀、計程儀則通過多串口通訊卡與控制計算機連接,多串口通訊卡插入控制計算機主板的PCI插槽;所述控制計算機與鋪管作業顯示系統通過網絡交換機-4進行連接。
對于各網絡所承擔的功能,此處以網絡(3)為例進行說明,其主要負責控制計算機與PLC數據的交換,執行數據發送和指令接收的功能。控制計算機接收動力定位PLC反饋的狀態數據,并向動力定位PLC發出控制指令。動力定位PLC則采用同軸電纜與CP5611 PROFIBUS通訊卡進行連接,CP5611插入控制計算機的PCI插槽,其采用DP協議,通訊率由此可以達到19.2Mbps。此通訊采用一對一的方式進行,從而減少了詢問時間,與TCP/IP相比具有穩定和通訊速率高等特點。
采用此種系統控制網絡的連接方式,PLC環形網絡大大提高了系統的可靠性,各交換機連接構成的網絡,某段線纜或某網絡節點中的交換機發生故障,并不會影響到其它網絡節點的正常通訊。PLC與控制計算機通過PROFIBUS通訊卡連接采用了DP協議并實現一對一連接,避免了通訊詢問,與通過交換機連接采用的TCP/IP協議相比,提高了通訊速率。風向風速儀、電羅經、運動單元、DGPS1、DGPS2、測深儀、計程儀則通過多串口通訊卡與控制計算機進行連接,采用RS-422接口與NEMA0183協議,實現了鋪管船動力定位系統與多種傳感器連接,從而提高了通訊速率并節約了成本。鋪管船動力定位控制系統所需的其它信息則通過艏PLC和鋪管控制PLC直接送至動力定位系統PLC,避免了線纜冗余,從而提高了系統的可靠性和靈活性[6]。
4 串口信號的采集方法
在上文硬件系統設計部分曾經提及到,動力定位系統中的信號除了采集PLC系統的數據外,其余通過串口或網關采集的信號則是需要通過程序進行解析的。外部的環境信號通過串口進入系統,此些串口信號均是NMEA-0183類型格式的,NMEA-0183格式數據串所有的數據均采用ASCII文本字符來表示,數據傳輸以“$”開頭,后面的則是語句頭。語句頭由五個字母組成,分成兩個部分,頭兩個字母表示“系統ID”,即說明該語句是屬于何種設備或系統,后面三個字母則表示“語句ID”,表示該語句是關于何方面的數據。語句頭后的便是數據體,其包含不同的數據體字段,語句末尾的是校驗碼(可選),以回車換行符<CR><LF>結束,即就是ACSII字符“回車”(十六進制的0D)與“換行”(十六進制的0A)。
解析信號具體可分為兩個步驟:1.從對應串口把數據讀上來并存放至緩沖區域中;2.查詢相關信號的產品技術手冊,按照對應的數據含義和數據格式,提取系統所需的相關信息。鋪管船中使用到這些傳感器的具體信號解析協議有風速風向、GPS、羅經等,此處以風速風向為例做如下說明[6]:
風速風向 MWV
$-- MWV,<1>,<2>,<3>,<4>,<5>*hh
<1>風向角度,0°到360°
<2>參考值,R=相對值,T=絕對值
<3>風速
<4>風速單位
<5>狀態位,A=數據有效性
<hh>校驗位
風速風向信號的采集:
1、以風速風向儀采集的某個數據片段為例:
$IIMWV,131,R,010.75,N,A*13
這是一個字符串,通過查詢產品技術手冊,可知$IIMWV是個頭,代表此數據片段的分類與總的含義,131代表風的角度,10.75則是風的速度。
2、程序段解析風速風向信號:
cstrCurrentData.GetLength();
for ( r4= 0; r4 < cstrCurrentData.GetLength(); r4++)
{
r1 = cstrCurrentData.Find("$IIMWV," , r4 ); //"$IIMWV,"
if ( r1 < 0 )
{
break;
}
r2 = cstrCurrentData.Find(",R," , r1 + 7 ); //",R,"
if ( r2 < 0 )
{
break;
}
r3 = cstrCurrentData.Find(",N," , r2 + 3 ); //",N,"
if ( r3 < 0 )
{
break;
}
sprintf(s2, "%s", cstrCurrentData.Mid( r1 + 7 , r2 - r1 - 7) );
m_strWindData.m_dWindAngle = atof( s2 );
sprintf(s2, "%s", cstrCurrentData.Mid( r2 + 3 , r3 - r2 - 3) );
m_strWindData.m_dWindSpeed = atof( s2 );
r4 = r3;
}
其中cstrCurrentData 是CString類型的數據,內容是采集的某個數據片段,例如$IIMWV,131,R,010.75,N,A*13。另外,通過網關進入系統的信號,只要映射好網關對應的串口,其接下來的操作則跟從串口讀取數據是一樣的,解析數據也是采用相同的方法。
5 結束語
海上石油開發關系到國民經濟的發展大局,各類高新技術與性能水平的海上石油和天然氣勘探、開采工程所需的海洋工程輔助船舶已成為當前急需開發與研究的項目[7]。而作為我國深水重大裝備研究的重要組成部分,鋪管船這一對象的研究將對深海油氣資源的勘探和開發有著積極意義[8]。本文從實際工程應用的角度出發,設計了一種鋪管船動力定位系統的硬件結構,同時在此基礎上介紹了串口信號的采集方法。本文所做的工作比較基礎,僅是為鋪管船動力定位系統提供可行性方案,希望可以為后續的深入研究提供一定的幫助。
參考文獻:
[1] 蘆樹平.深水起重鋪管船關鍵技術研究[D].哈爾濱工程大學,2011.
[2] 劉嵬輝,曾寶,程景彬等.國內外鋪管船概況[J].油氣儲運,2007,26(6):11-15.
[3] 潘雲,程峰,金瑞健等.淺水鋪管船鋪管作業系統設計簡述[J].船舶,2010,21(3):49-54.
[4] 趙志高,楊建民,王磊等.動力定位系統發展狀況及研究方法[J].海洋工程,2002,20(1):91-97.
[5] 程峰.2×8000t半潛起重鋪管船鋪管系統研究[J].船舶,2012,23(1):71-75.
[6] 張躍東.耙吸式挖泥船動力定位系統工程化研究[D].江蘇科技大學,2011.
[7] 陳建光.深海鋪管起重船的電力推進控制系統[J].艦船科學技術,2010,32(11):34-38.
[8] 魏躍橋,邱海榮,劉炫等.深水鋪管起重船鋪管工藝研究[J].中國水運(下半月),2011,11(5):93,96.