王 劍
(天津航海儀器研究所,天津 300131)
摘 要:隨著社會老齡化進程的不斷發展,老年人口所占比重也逐年增加,而老年人的生理特點造成了他們這一人群的特殊行為特征棗易跌倒。為了解決跌倒監測、報警求助和步態加速度數據等問題,本文在分析比較國內外跌倒檢測及相關技術的基礎上,考慮了系統的實用性等因素,設計了一個跌倒檢測的實時監測系統,它采用MEMS三軸加速度傳感器ADXL345進行加速度數據采集,中央處理器TMS320F2812進行數據分析,并設計報警器來完成監測系統的搭建。實驗結果表明該系統在老人跌倒時能夠監測并進行報警,為及時進行救援贏得了寶貴的時間。
關鍵詞:跌倒檢測;微機電系統;TMS320F2812;加速度傳感器
中圖分類號:TP271 文獻標識碼:B 文章編號:1003-7241(2013)06-0081-05
1 引言
隨著社會老齡化進程的不斷發展,老年人口所占比重也逐年增加,而老年人的生理特點造成了他們這一人群的特殊行為特征——易跌倒。跌倒檢測技術的方法很多,從信號采集的渠道進行分類,將跌倒檢測技術分為三類:基于視頻的跌倒檢測系統,基于聲學的跌倒檢測系統,基于穿戴式傳感器的跌倒檢測系統[1]。基于視頻的跌倒檢測系統只能在安裝了攝像機的地點進行檢測。另外還可能會對被檢測者造成個人隱私的泄漏。因此通常這種方法無法得到很好的精度,一般只能作為其它檢測方法的輔助檢測。基于穿戴式傳感器的跌倒檢測系統不會受到檢測地點的限制,所以基于穿戴式傳感器的跌倒檢測系統比基于視頻或聲學系統更適合應用于跌倒監測器[2]。
為了解決老年人跌倒實時檢測問題,本文設計了基于穿戴式傳感器的跌倒實時監測系統,其中的傳感器采用MEMS是因為它的低成本、低功耗、小尺寸和批量化,而且隨著技術的進步,它又向高精度傳感器的方向發展[3,4]。監測系統的檢測原理是通過跟蹤傳感器佩戴者在三個正交方向的加速度變化來檢測其體位的變化,然后以跌倒檢測算法對數據進行分析,以確定佩戴者的身體是否跌倒,如果跌倒則進行報警。而判別是否發生跌倒的方法主要有判斷閾值的方法和利用模式識別的方法。當佩戴者發生跌倒時,各方向上的加速度矢量會發生變化,通過設定有效的閾值,當判斷到某方向的加速度矢量超過閾值時,結合時間長度判定是否發生跌倒。
2 硬件設計
跌倒監測系統設計時需要遵循的原則[5]有:
1.所有超出閾值的情況都能夠檢測到;2.能夠確定需要報警的情況;3.能夠通過分析測得的數據來確認真正的跌倒;4.能夠在一定范圍內的任何地方,在最短的時間內報警;5.不會影響使用者的正常生活;6.可靠,易于維護;7.不會再跌倒時造成使用者的受傷;8.可根據使用者的需要進行必要的調整;9.易用,不需要太多學習;10.能夠進行自測,確保工作正常。
本文基于MEMS三軸加速度計設計了老年人跌倒監測系統,該設計采用傳感器進行信號采集,然后通過采集到的信號判斷跌倒報警器的配戴者是否跌倒,并且將實時數據在顯示裝置上顯示出來,如果佩戴者跌倒則通過報警器進行報警。檢測原理框圖如圖1所示。
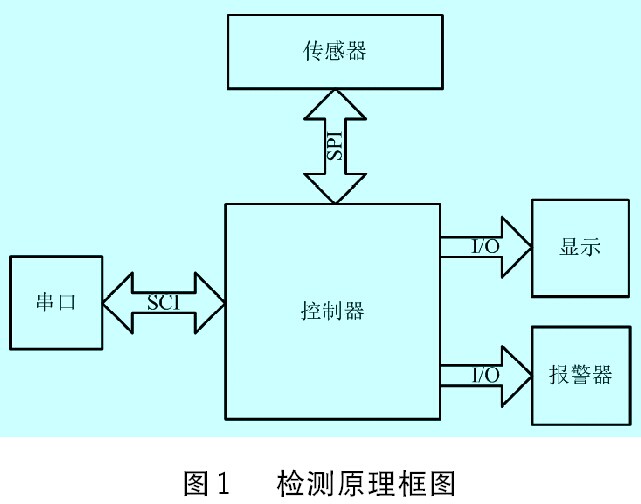
2.1 控制器
作為跌倒檢測的核心,它負責進行系統的整體運行,包括控制加速度傳感器進行加速度的采集以及數據的處理分析,判斷佩戴者是否跌倒等一系列工作。本設計選擇TI公司的TMS320F2812[6],它擁有運算精度高,處理能力強,靈活性高等優點。
2.2 傳感器
傳感器負責獲取人體活動的加速度信號,本設計選擇ADI公司的三軸加速度傳感器ADXL345,它擁有體積小,功耗低,分辨率高(13位),測量范圍大(±16g)等優點[7,8],而且它的輸出為數字輸出,簡化了處理器進行數據處理的過程,提高了檢測的效率。
2.3 顯示、報警器
顯示電路負責加速度數據的實時顯示,本設計采用SO12864進行顯示[9],它擁有驅動電壓低,工作溫度范圍大等優點,而且它內置漢字庫,因此編程簡便,使用起來比較方便。為了節省成本的一系列考慮,報警器則采用蜂鳴器。
3 軟件設計
3.1 軟件系統功能
軟件設計是各項功能實現的關鍵,通過軟件設計,應該使系統能夠實時監測和控制外圍功能模塊,及時處理異常情況,還要實時采集三軸加速度傳感器輸出的加速度矢量,并且通過算法判斷是否發生跌倒,如果發生跌倒則進行報警。
3.2 SPI通信
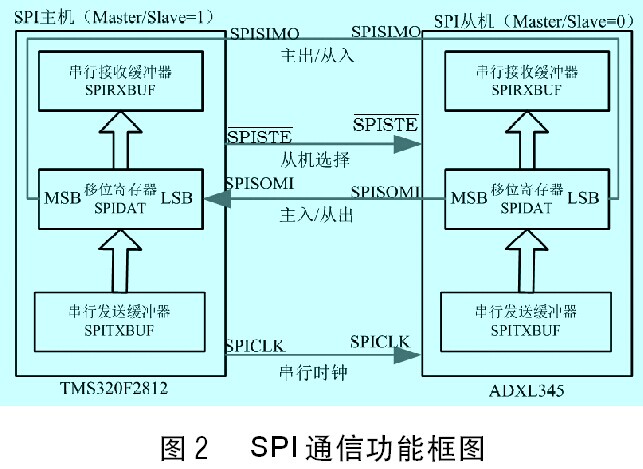
在整個系統中,最重要的是加速度的采集、傳輸與處理,其中采集由傳感器完成,而傳感器與處理器之間是通過SPI通信建立連接,傳感器ADXL345與處理器TMS320F2812通信連接的功能框圖如圖2所示,它們的連接方式為主從式,主機為處理器TMS320F2812,從機為傳感器ADXL345,主機通過發出SPICLK信號來啟動數據傳輸,對于主機和從機,數據都是在SPICLK的一個邊沿移出移位寄存器,并在相對的另一個邊沿鎖存到移位寄存器。
3.3 跌倒檢測算法設計
(1) 模式識別算法
利用模式識別的方法實現跌倒檢測的有很多種,其中西安交通大學研究的跌倒檢測算法比較具有代表性。該系統中跌倒檢測分為兩個層次的算法:預處理和高級處理。
預處理是通過支持向量機算法從輸入中提取疑似跌倒數據。所采用的算法One-class SVM算法是由SVM算法擴展而來。該算法利用核函數將所有樣本映射到高維特征空間實現分類。在特征空間里,One-class SVM確定一個包含所有目標數據的最小超球體表面,這個表面就是分類器。用一組松弛變量來平衡超球體的半徑和超出超球體的樣本數量。這種算法使大多數陽性樣本(跌倒樣本)被保留,而大多數假陽性樣本被放棄。高級處理是通過KFD算法將可疑數據實現最佳的分離,再通過k-NN算法實現精確分類。
(2) 簡單算法
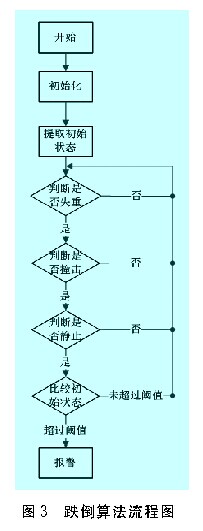
由于人的跌倒過程會依次出現失重、撞擊、靜止這三個現象,該算法以此為判斷依據,具體的判斷依據如下:
◇ 失重現象發生在跌倒之初,加速度的矢量和降至近0g的水平,持續時間取決于自由跌倒的高度,此為確定跌倒的第一個判斷依據,可以由ADXL345的FREE_FALL中斷來檢測。
◇ 撞擊現象發生在失重現象后,該現象表現為劇烈沖擊,由ADXL345的Activity中斷來檢測,此為確定跌倒的第二個依據。
◇ 一般在跌倒撞擊地面后,人體無法立即站起來,因此人體會在短時間內保持靜止狀態,由ADXL345的Inactivity中斷來檢測,此為確定跌倒的第三個依據。
◇ 由于跌倒后人體會翻轉,因此三個軸的加速度與跌倒前的初始狀態有所不?同,因此需要在Inactivity中斷之后讀取三個軸的加速度數據,然后將采樣數據與初始狀態進行比較,確定跌倒的第四個依據是采樣數據與初始狀態之差是否超過一定閾值(如0.7g)。
這四個依據共同構成整個跌倒檢測算法,在此基礎上系統可根據跌倒狀態報警。中斷間的時間間隔必須在一定范圍內,正常情況下,FREE_FALL中斷與Activity中斷之間的時間間隔不應過長,除非從極高處跌落,具體的跌倒檢測流程圖3所示。
上述兩種算法各有特點,模式識別算法精度高,誤報率低,但結構較復雜,運算量大,對控制器的要求較高,而簡單算法實施起來比較簡單,但是精度略低,有一定的誤報率,但經過試驗后發現誤報率在可接受的范圍內,因此本文采用簡單算法。
4 實驗測試
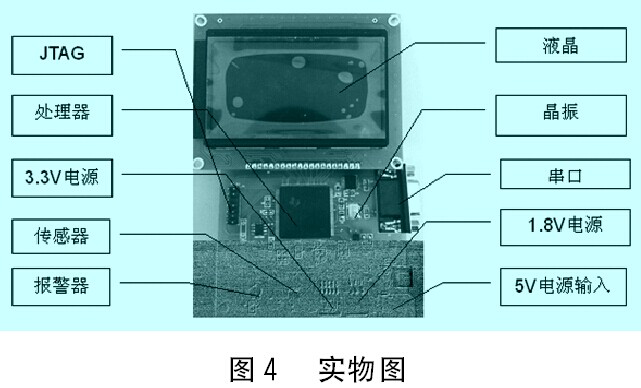
按照上述方案設計完成的跌倒監測器樣機線路板如圖4所示,上電后,該線路板各功能模塊工作正常,針對系統的整體測試主要分為兩步,分別為靜態測試與動態測試,下面分別進行介紹:
4.1 靜態測試
靜態測試的測試方法為測試X軸、Y軸、Z軸分別向上與向下時各個軸的加速度數據,選用的測量精度為10位,測量范圍為±2g,經100次實驗測量取平均后測得的數據如下所示


由于ADXL345輸出的是補碼,因此需要將輸出轉換成原碼,方法為將Datax、Datay、Dataz的值與32768比較,如果它們的值小于32768,說明它們是正數,則它們的原碼為本身,如果它們的值大于32768,說明它們是負數,則用它們的值減去65535才能得到原碼,處理后得到一組新的DATAX、DATAY、DATAZ,因此我們得到的加速度最終值如下,單位為g
通過以上處理后,可以看出當某一個軸豎直向上和向下時,它的加速度值接近±1g,而其它兩個軸接近0g,由于向上、向下的方向都是目測的,因此得到的結果存在一定的誤差,但總體上在在我們的允許范圍內,符合我們預期的要求。
4.2 動態測試
動態測試主要是模擬跌倒時測試加速度的變化,測試方法為通過串口采集模擬跌倒時加速度的值,然后將采集到的值保存下來使用matlab進行處理并且繪制加速度曲線。
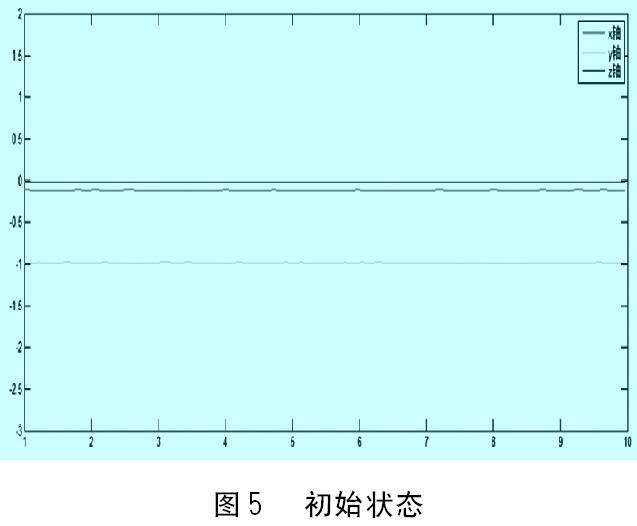
動態測試分為兩步,第一步進行初始狀態的采集,采集到的加速度曲線如圖3所示,從圖中看出Y軸數據接近-1g,而其余兩個軸接近0g,與佩戴者將Y軸向上的情況相符合。
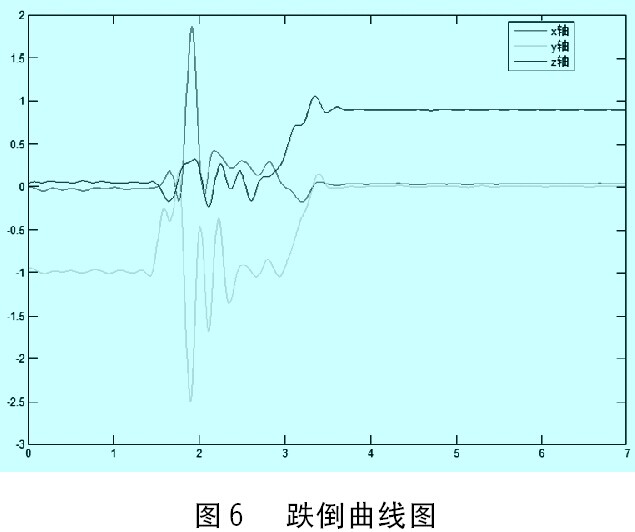
動態測試的第二步為對模擬跌倒的加速度進行采集,采集到的加速度曲線如圖4所示,從圖4中可以看出,在跌倒之初,三個軸的加速度和有一個急劇下降的過程,然后人體與地面劇烈碰撞,加速度和急劇上升,然后人體處于靜止狀態,它的三個軸中Z軸的加速度接近1g,其它兩個軸接近0g,與初始狀態不同,說明人體已經跌倒,符合預期的結果。
5 結束語
老年人跌倒檢測系統采用TI公司的TMS320F2812作為核心控制單元,對加速度采集的數據進行處理與分析,并判斷佩戴者是否跌倒,如果跌倒則控制報警器進行報警,并且控制SO12864顯示實時的加速度數據。實際產品中報警顯示器與跌倒檢測系統是分離開的,并通過無線網絡連接。若老年人跌倒,通過GPS可實現監護者對老年人單向定位。另外由于時間關系,跌倒檢測算法需要在日后進一步完善。
參考文獻:
[1] 鄒眾鷹,謝存禧.基于家庭的遠程健康監護系統進展[J].計算機工程與應用,2005,30(10):20-34.
[2] 孫新香.基于三軸加速度傳感器的跌倒檢測技術的研究與應用[D].上海:上海交通大學,2008.
[3] 周鳳岐,劉智平,周軍等.硅微技術在導航、制導與控制中的應用及發展趨勢[J].測控技術,2007,26(3):5-7,21.
[4] 丁衡高,袁祖武.微機電系統技術的實際應用棗微型儀器[J].國防科技大學學報,2000,22(2):90-94.
[5] 趙祥欣.基于三維加速度傳感器的跌倒檢測研究[D].杭州:浙江大學,2008.
[6] 蘇奎峰,呂強,耿慶峰等.TMS320F2812原理與開發[M].北京:電子工業出版社,2006:11-18.
[7] 李興法,尹冠飛.數字式加速度傳感器ADXL345的原理及應用[J].黑龍江科技信息,2010,(36):2,14.
[8] 黃曉東,黃曉華.微電子機械系統ADXL345的應用研究[J].企業技術開發,2012,32(16):28-30.
[9] 康海洋,楊風.基于TMS320F2812的液晶顯示模塊SO12864設計[J].電子測試,2010,9(9):54-57.