摘要
在一些崎嶇不平的地面甚至危險(xiǎn)場(chǎng)合�����,多足式機(jī)器人具有極大的運(yùn)動(dòng)穩(wěn)定性�����,環(huán)境適應(yīng)能力強(qiáng)�����,可用于搶險(xiǎn)����,勘測(cè)等領(lǐng)域�。Arduino是一款便捷靈9G舵機(jī),相比PWM舵機(jī)更活、方便上手的開(kāi)源電子原型平臺(tái)�����。本研究采用HX1027DT數(shù)字總線(xiàn)加智能��。

技術(shù)
基于Arduino控制的六足機(jī)器人系統(tǒng)�����,采用串口通信的方式與32路舵機(jī)控制板進(jìn)行數(shù)據(jù)交互,擁有18個(gè)關(guān)節(jié)自由度����,能以不同的步態(tài)進(jìn)行移動(dòng)�。實(shí)驗(yàn)表明單片機(jī)可以對(duì)六足機(jī)器人進(jìn)行控制����,步態(tài)規(guī)劃與程序設(shè)計(jì)合理。本文關(guān)鍵詞:六足機(jī)器人;Arduino;舵機(jī)�����;紅外控制����。
方案
1 運(yùn)動(dòng)機(jī)理
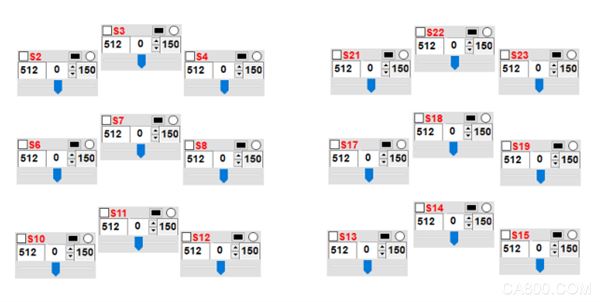
機(jī)器人有六足�,每足三個(gè)關(guān)節(jié),每個(gè)關(guān)節(jié)處有一個(gè)舵機(jī)�����,共18個(gè)舵機(jī)驅(qū)動(dòng)關(guān)節(jié)做旋轉(zhuǎn)運(yùn)動(dòng),舵機(jī)布局如下所示:
2 驅(qū)動(dòng)系統(tǒng)
舵機(jī)控制角度達(dá)270°����,工作電壓5V-8V,堵轉(zhuǎn)扭矩1.8kg/cm (8V),工作方式為TTL單線(xiàn)串口通訊�。
實(shí)現(xiàn)
1 電路設(shè)計(jì)
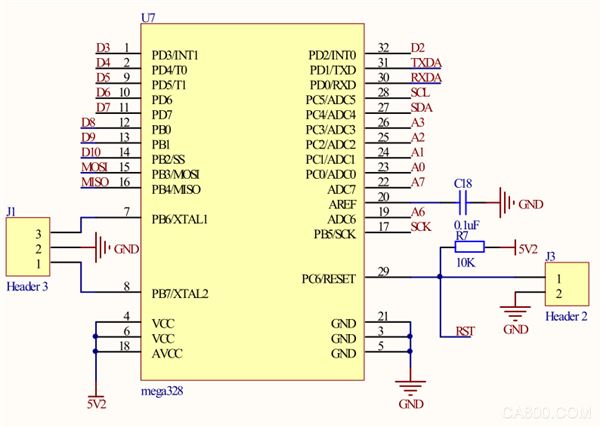
采用模塊化設(shè)計(jì)�,主控芯片采用STC8F2K16S2,主控制器采用7.4V 40C 2800mah 鋰電池供電�����,迷你控制器采用7.4V 40C 1000mah 鋰電池供電�����,電池的紅色接口接控制板電源線(xiàn)�,
白色接口是充電接口��。插到主控制版D2接口��。電路圖如下所示:
2 程序設(shè)計(jì)
指令Line 驅(qū)動(dòng)舵機(jī)
格式:Line+#ID序號(hào)+P+角度值+T+運(yùn)轉(zhuǎn)時(shí)間+結(jié)束符
指令RE_pos 讀取舵機(jī)角度值
格式:RE_pos+#ID序號(hào)+POT1+結(jié)束符
返回:#+ ID序號(hào)+P+角度值+結(jié)束符
結(jié)語(yǔ)
基于Arduino控制的六足機(jī)器人控制系統(tǒng)解決方案研究結(jié)果表明:
1. 采用3*6布局控制舵機(jī)既能實(shí)現(xiàn)對(duì)多路舵機(jī)的控制又能保證總線(xiàn)控制的精確性。
2. 利用紅外線(xiàn)模組,可用遙控器進(jìn)行遠(yuǎn)程操控�。
3. 六足機(jī)器人運(yùn)用Arduino編程�,設(shè)計(jì)簡(jiǎn)單��, 增進(jìn)人們對(duì)Arduino的認(rèn)知�。