1 引言
傳統的電氣設備已經滿足不了現代化安全性能的要求,更加智能的電氣化設計系統已經成為主流的發展方向[1],目的是讓機器安全在智能制造中扮演著重要的角色。機器安全不僅能使制造商滿足合規要求,而且能夠幫助制造商提高生產效率。在機器安全方面做得好的安全系統設計可以提高5%-7%的設備總體效率、減少2%-4%的非計劃停機、并減少一半安全事故[2]。
2 機器人推盤堆垛機應用場景安全等級的確定
2.1推盤堆垛機場景實例分析
機器人推盤堆垛機在工廠運輸物料板的場景如圖1所示
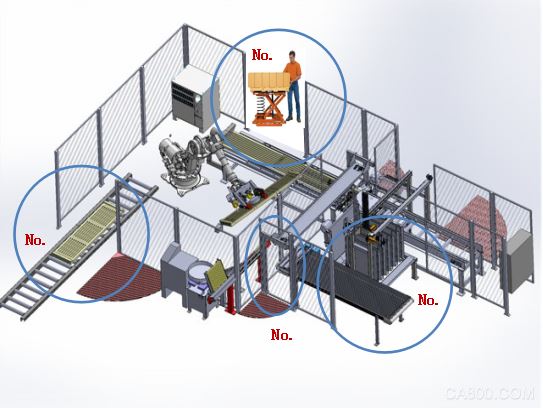
圖1 場景應用圖
在No1階段是進料傳送帶機器人工作單元入口點。1,太陽能板產品經過剪切后,由進料傳送帶運送至機器人工作單元;2,操作員和維護人員不允許從該處進入機器人工作單元,以免被機器人手臂沖撞而導致傷殘,甚至死亡。
在No2階段是操作員放置包裝箱區域。1,操作員將包裝箱放置在堆垛區傳送帶上,由機器人進行最終包裝;2,操作員的工作區(長度2米)是開放的,如果操作員在該區域內,機器人應當停機,直到操作員離去;3,為了安全起見,不允許操作員通過此開放門進入機器人工作單元,以免被機器人手臂沖撞而導致傷殘,甚至死亡[3]。
在No3階段是維護人員進出口門。1,維護人員需要定期進入機器人工作單元執行維護任務;2,在進入機器人工作單元之前,為保證安全起見,維護人員必須要在相關的電氣控制柜上上鎖掛牌(Lock Out Tag Out),待完成維護任務出來后才能解除上鎖掛牌[4];3,維護人員在機器人工作單元內執行維護任務時,機器人應當處于停機狀態,待維護人員完成維護任務出來后,并且關閉好維護門,操作員才能啟動機器人.
在No4階段是出料傳送帶機器人工作單元出口點。1,機器人將打包好的包裝箱從包裝區搬移至出料傳送帶上運出;2, 操作員和維護人員不允許從該處進入機器人工作單元,以免被機器人手臂沖撞而導致傷殘,甚至死亡。
2.2 推盤堆垛機機器人在工作區域的安全等級確定
風險參數:
S 受傷程度 S1 輕傷 S2 重傷
P 避免危險可能性 P1 特殊情況下 P2 幾乎不可能
風險等級劃分如圖2所示

圖2 風險等級劃分
可以確定這四個危險點所需的安全性能等級PLr如下:
風險點1: S=S2, F=F1,P=P2,所以 PLr=d。
風險點2: S=S2, F=F2,P=P2,所以 PLr=e。 按照機器人標準中規定,可以采用PLr=d的性能等級,故選擇PLr=d 做為最終所需的性能等級。
風險點3: S=S2, F=F1,P=P1,所以 PLr=c。 傳送帶速度很低。
風險點4: S=S2, F=F1,P=P2,所以 PLr=d。
2.3 安全電氣設備
安全光幕由一個發射器和一個接收器組成,可在危險區域前方或周圍形成多束紅外光柵。發射器與接收器通過與外殼一端最接近的光電束進行同步[5]。為消除由于環境光或其它光電設備干擾(串擾)而引起的錯誤跳閘,以特定頻率對發射器中的各 LED 連續施加脈沖,這樣發射器只能影響與之關聯的特定接收器。
安全激光掃描器器是 type 3光電設備,利用發射的紅外線激光的漫反射確定是否有人員或物體闖入定義 的區域。旋轉反射鏡定期發射1類(人眼安全)紅外線激光脈沖,覆蓋190°角度區域,以形成二維檢測區域。
安全地毯是壓敏安全防護產品,旨在用于檢測感應表面上是否有人員存在。安全地毯有兩個堅硬的導電鋼板,被不導電的可壓縮隔離物分開。安全地毯上無物體時,控制單元向機器控制電路發送信號。有人員或物體踏上安全地毯時,兩個導電金屬板互相接觸,電路電阻降為零。
使能開關是要在機器防護設備內部作業(例如,安裝、維護或故障排除),三位使能開關可作為所需條件的一部分來實現安全作業[6]。此類開關重量輕并具有人體工程學設計,易于使用。
3 Safety Automation Builder(SAB)模型建立及分析
基于羅克韋爾公司的Safety Automation Builder軟件對上述流水生產線的場景圖進行仿真和添加電氣安全設備。建立的模型如圖3所示。
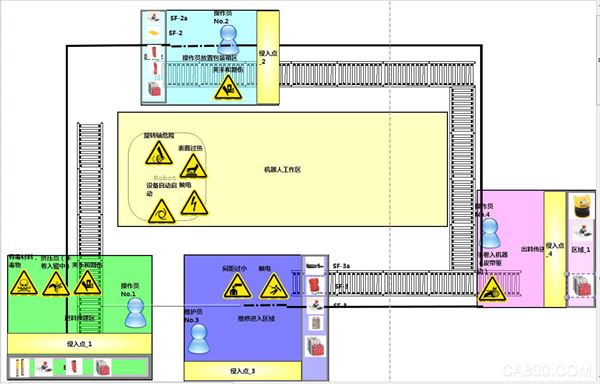
圖3 仿真模型
在No.1侵入點處設計方案是:①給工人配備基本的防護用具,如口罩,手套等來解決有毒材料及夾手和割傷的風險。②在傳送帶附近安裝急停開關880FP-MT44,工人一旦手卷入輥中,立即按下急停開關,通過繼電器440R-D22R2判斷及100S-C16KJ14C(有子系統)的反應使整個區域斷電,傳送帶立即停止工作。③在傳送帶兩側垂直安裝了安全光幕445L-P4S1200YD,一旦人員違規進入,在穿透應用中光幕被切斷,通過繼電器440R-D22R2判斷及100S-C16KJ14C(有子系統)的反應將會向危險區域發送停機命令在No.2侵入點處設計方案是:①給工人配備如口罩,手套等工具。②我們在放置包裝箱區進口處安裝了急停裝置880FP-MT44,當事故發生時按下急停裝置,通過邏輯設備440R-S12R2作出判斷發送斷電停止設備的指令到輸出設備100S-C16KJ14C并使其做出停電反應使傳送帶停下來。③在堆垛區安裝了440F-M2020BYNN型號的安全地毯。一旦人員違規進入機器人工作區使安全地毯兩個導電金屬板互相接觸,邏輯設備440R-C23139監視到此情況后立即通過輸出設備100S-C16KJ14C向機器發送停止信號使機器停止轉動在No.3侵入點處設計方案是:①給維護人員配備防護用具如防觸電膠鞋,工作手套等。②我們在維護人員進出口處安裝了安全互鎖440G-T27121,防止外部人員闖入機器人工作單元。③維護人員進行維護時,要對機器進行調試,必須能隨時啟動和關閉機械手臂運轉,因此我們安裝了440J-N21TNPM型號的使能設備通過與互鎖開關共用的邏輯設備和輸出設備與機械手臂控制端相連,來達到隨時控制啟動和關閉機械手臂運轉來進行維護與測試工作[8]。
在No.4侵入點設計方案是:①在出料傳送帶機器人工作單元出口處安裝442L-SFZNSZ型號的激光掃描器,當有人員想靠近時,激光掃描器便可觸發聲音報警或激活警告指示燈,以警告闖入的人員或物體。②我們在出料傳送帶出口處還安裝了急停設備880FP-MT44,如果激光掃描器設備損壞,當人員接近出料工作區域接觸傳送帶導致手臂被卷入傳送帶,可以立即按下即停按鈕,危險信息會被送到輸出設備100S-C16KJ14C(有子系統)將指令送到中心控制系統,進行斷電動作。
4 SISTEMA軟件安全性能檢驗
SISTEMA軟件是德國社會意外保險職業安全與健康研究所提供的免費工具軟件(如圖4所示),而且為開發和測試與安全相關的機器控制的人員提供滿足國際標準EN ISO 13849-1的安全評估的全面支持。同時能夠自動計算各種安全性能等級(PL)的可靠性數據,通過對Safety Automation Builder仿真文件導入SISTEMA中可以檢測安全等級是否符合要求。
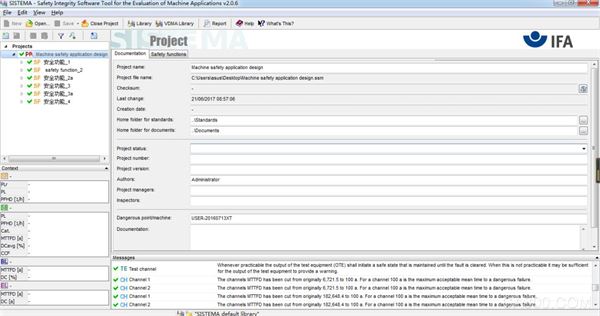
圖4 SISTEMA軟件評估
檢測安全等級符合要求后可得到SISTEMA的安全等級報告,如圖5所示
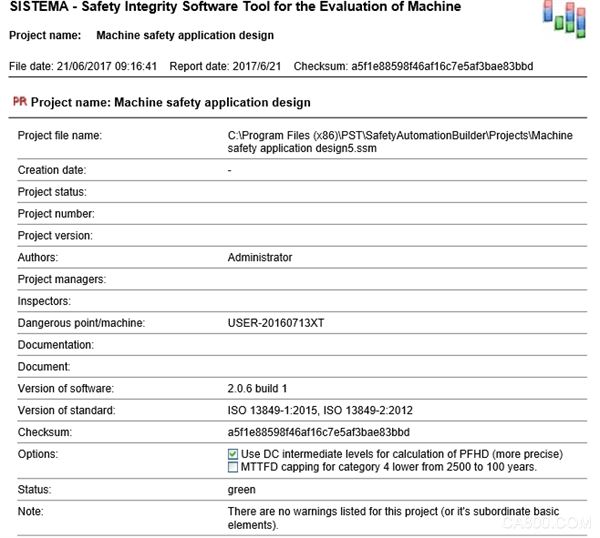

圖5 安全評估報告
5 結束語
通過識別和理解機器人在生產中的應用,分析危險區域存在的安全隱患。并.對危險點進行風險評估和安全性能等級的確定[9]。基于羅克韋爾公司Safety Automation Builder(SAB)和SISTEMA對安全系統進行評估達到安全性能要求,基于現代化的輸入—邏輯—輸出系統的安全防護,可以大大降低操作人員在工作中發生意外的概率[10]。