模擬和離線編程(OLP)軟件允許用戶在實際安裝任何設(shè)備前設(shè)計、編程和調(diào)試機器人系統(tǒng)。 其結(jié)果是,這些軟件工具幫助在機器人系統(tǒng)的安裝過程中顯著降低了調(diào)試成本。
川崎提供了三種模擬與OLP軟件工具:
K-ROSET - 機器人模擬軟件
K-SPARC - 碼垛軟件
KCONG - 離線編程軟件
機器人模擬軟件 - K-ROSET
K-ROSET是川崎的離線機器人模擬軟件。該工具允許用戶添加川崎機器人、外圍設(shè)備、機器人工具及工件的3維模型到一個虛擬環(huán)境中并建立多機器人自動化工作單元。該軟件模擬了真實川崎機器人控制柜的過程,并允許用戶通過示教器屏幕和按鈕布局與3維機器人模型交互。用戶可以舒服地通過一臺筆記本電腦屏幕建立一個工作單元的完整3維示意圖,編寫特定應(yīng)用的機器人代碼,然后運行該機器人的代碼,同時觀看機器人的運動和邏輯。
K-ROSET有幾個內(nèi)置的工具,最大限度地實現(xiàn)模擬的效果,如碰撞檢測、周期時間分析和安裝位置分析。碰撞檢測功能提醒用戶在程序運行過程中對象是否發(fā)生了碰撞。當(dāng)虛擬機器人控制柜處理模擬時,軌跡和周期時間分析工具產(chǎn)生高度準(zhǔn)確的結(jié)果。用戶可以輸出3維虛擬工作單元的視頻文件,用于設(shè)計評審和銷售演示。

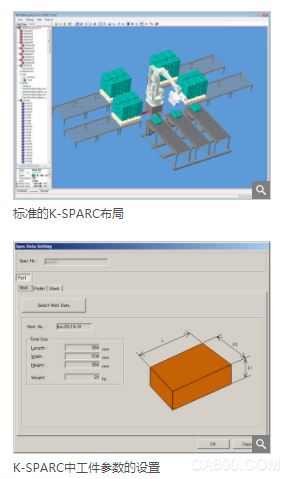
碼垛軟件 - K-SPARC
K-SPARC建立在K-ROSET平臺之上,是川崎的碼垛軟件。這個工具通過簡單的步驟,引導(dǎo)用戶設(shè)定一個單一的機器人碼垛工作單元。
從R,Z,M系列型號中選擇機器人
從12個可用的布局中選擇
定義托盤和工件參數(shù)
選擇樣式和位置順序
加載數(shù)據(jù)到虛擬機器人,改進(jìn)拾放點
通過界面面板控制碼垛作業(yè)
從開始到結(jié)束,用戶可以實現(xiàn)隨時可以加載的AS程序,該程序可以直接在機器人控制柜中使用。K-SPARC支持包和箱子的碼垛,有超過100種內(nèi)置樣式可供選擇。除了編寫AS機器人代碼,K-SPARC還可以輸出充分開發(fā)的可直接實施到生產(chǎn)中的用戶界面。
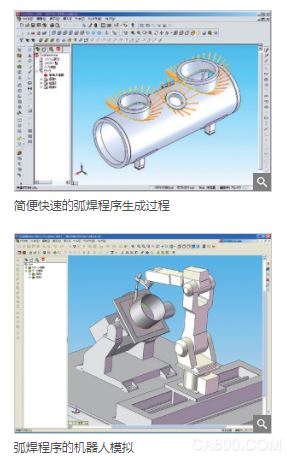
離線編程軟件 - KCONG
川崎的KCONG離線編程軟件用于基于工件的幾何形狀自動生成機器人的焊接路徑。3維CAD零部件和模具的數(shù)據(jù)與提供的川崎機器人型號庫一起導(dǎo)入到KCONG中。然后,用戶輸入應(yīng)用參數(shù),并選擇工件幾何形狀來自動生成機器人的焊接路徑。
K-CONG使復(fù)雜弧焊接頭形狀生成工具路徑的過程方便而快捷。根據(jù)復(fù)雜程度,路徑的教授過程可能通常需要數(shù)百個手動教導(dǎo)點,需要耗費大量的時間和現(xiàn)場成本來實施。一旦已輸入應(yīng)用參數(shù)并選擇工件的幾何形狀后,用戶就可以觀看弧焊過程的模擬,檢查碰撞,并對所生成的機器人路徑進(jìn)行微調(diào)。