1.概述
本方案主要用于門式結構或橋式結構雙軸平移時,糾正因雙軸速度不同步引起位移偏差而導致橫梁平衡角大于容錯角致使機械卡住。可用于門式起重機/橋式起重機,立體停車架等平移同步上的應用。
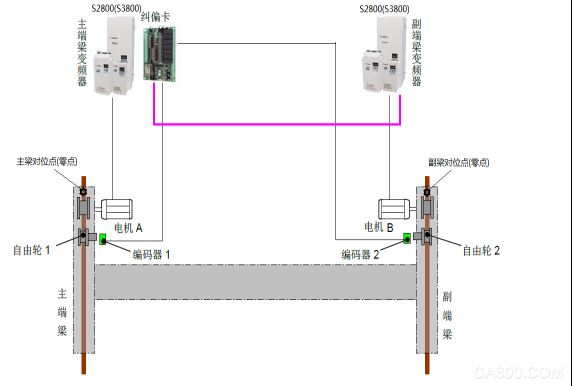
2.系統組成
3.功能描述
3.1對位點
對位點用于設置主梁與副梁參照的絕對位置,消除系統長時間運行時所產生的累積誤差。
3.2位置檢測
主梁與副梁上分別安裝有開集電極的正交編碼器。運行中遠離對位點的方向為正方向(增計數),接近對位點的方向為負方向(減計數)。
3.3同步
根據檢測到的主梁與副梁所得到的位置偏差,并且根據用戶所設參數,可執行不同步,自動同步,超偏差停車等功能
3.4精度
本裝置上兩組正交編碼器輸入計數頻率可達50K。在實際應用中,控制的精度與編碼器線數及自由輪半徑大小相關。正比于編碼器線數,反比于自由輪半徑。要求兩編碼器線數一致,自由輪半徑一致。
3.5故障
超偏差故障,本裝置在變頻啟動后,前3S不對超偏差進行檢測。3S后當前兩主梁與副梁的偏差大于所設定的最大偏差時。關閉輸出,并給變頻器故障信號。
4.硬件連接圖
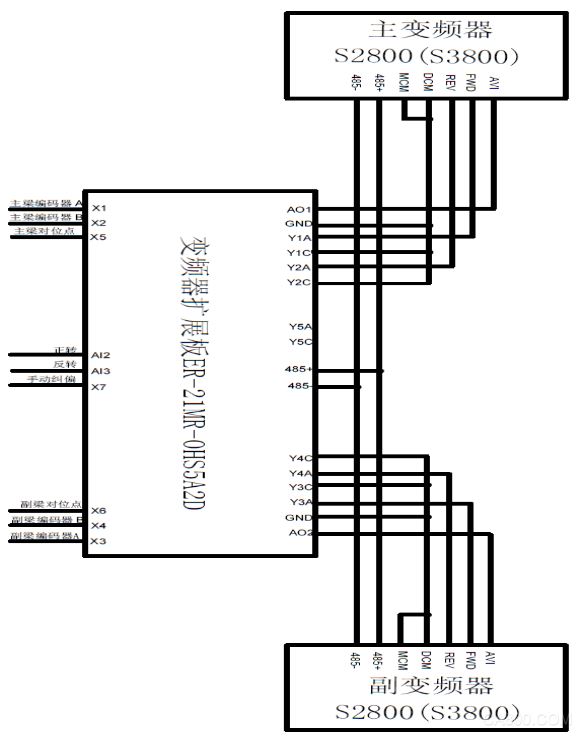
5.端點定義

6.擴展板參數
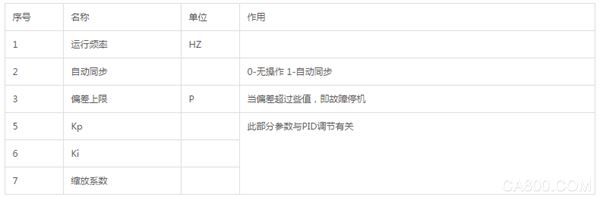
7.變頻器參數
可根據實際應用進行相關參數調整。
