幾周前,我們發(fā)布了賓夕法尼亞大學(xué)Vijay Kumar's Lab的研究成果,他們僅僅通過機(jī)載定位,就可以讓四軸無人機(jī)快速通過狹小的縫隙。這個(gè)重大研究成果意味著無人機(jī)可以不再依賴外部定位系統(tǒng),實(shí)現(xiàn)自我避障。值得一提的是,在這項(xiàng)研究中,無人機(jī)可以預(yù)先提供這個(gè)狹小縫隙的位置和定位信息,而不是在鉆進(jìn)去的時(shí)候才能做出識(shí)別。
27日,蘇黎世大學(xué)機(jī)器人技術(shù)和感知研究團(tuán)隊(duì)的帶頭人Davide Falanga, Elias Mueggler, Matthias Faessler和Davide Scaramuzza教授分享了一些他們投給2017年IEEE機(jī)器人與自動(dòng)化國際會(huì)議(ICRA)的研究成果。他們的研究中涉及到的無人機(jī)具備與上文提到的自動(dòng)避障無人機(jī)相似的功能,但功能的實(shí)現(xiàn)不是都靠機(jī)身搭載物(包括感知障礙),這就是它們?cè)谧詣?dòng)化開發(fā)上的一些突破。
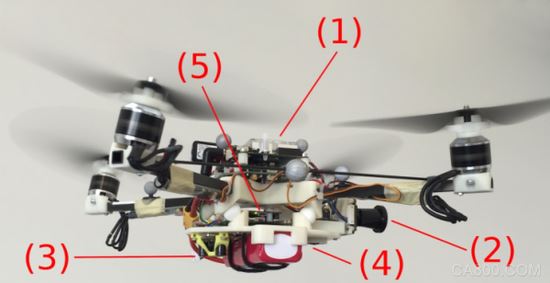
上圖就是蘇黎世大學(xué)研發(fā)團(tuán)隊(duì)在實(shí)驗(yàn)中用到的四軸無人機(jī)。(1)機(jī)載計(jì)算機(jī);(2)向前的魚眼攝像機(jī);(3)TeraRanger One遠(yuǎn)距離感應(yīng)器;(4)向下攝像機(jī);(5)PX4自動(dòng)飛手。發(fā)動(dòng)機(jī)可以傾斜15度,提供三倍的偏航控制,同時(shí)集體推力只會(huì)降低3%。
為了讓這些無人機(jī)在體積比它們大1.5倍,且兩側(cè)邊緣距離僅有10厘米的縫隙間飛行,研究團(tuán)隊(duì)使用了752 x 480像素、搭載了180度視場(chǎng)的透鏡和一個(gè)型號(hào)為PX4FMU,搭載了慣性測(cè)量裝置和用機(jī)器人操作系統(tǒng)(ROS)的智能手機(jī)級(jí)別的單板機(jī)Odroid XU4 電腦的自動(dòng)駕駛儀。在通過縫隙之后,無人機(jī)會(huì)使用向下距離傳感器和攝像機(jī)保持自身穩(wěn)定。所有的感應(yīng)和計(jì)算過程都是在無人機(jī)機(jī)身上實(shí)現(xiàn)的,這意味你可以在居家環(huán)境中完成整個(gè)操作過程。
盡管整個(gè)平臺(tái)是定制的,但是大部分硬件都是標(biāo)準(zhǔn)化的。其中一個(gè)引人矚目的調(diào)整是,無人機(jī)的旋翼傾斜了15度,這在對(duì)推力沒有影響的情況下,將偏航控制提高了三倍。強(qiáng)大的偏航控制非常重要,因?yàn)樗妮S無人機(jī)在接近縫隙時(shí),角速度最高可達(dá)每秒400度。
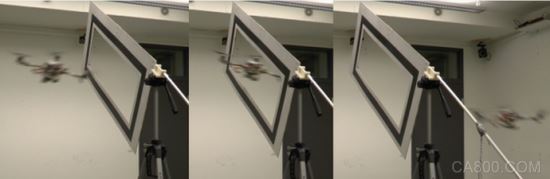
真實(shí)世界中,無人機(jī)穿過窗戶的全過程是這樣的:首先,無人機(jī)會(huì)通過它身上搭載的攝像機(jī)對(duì)縫隙進(jìn)行定位。接著,它會(huì)計(jì)算出一個(gè)可以通過縫隙的軌道,這個(gè)軌道要讓無人機(jī)離邊緣越遠(yuǎn)越好,同時(shí)也要讓這個(gè)縫隙被無人機(jī)的攝像機(jī)捕捉到越多越好。這個(gè)軌道基于縫隙橫斷物,所以無人機(jī)要能夠高速移動(dòng)且實(shí)現(xiàn)側(cè)偏的定位,這么一來,系統(tǒng)就需要找到第二條軌道,它可以讓無人機(jī)平穩(wěn)懸停后在縫隙中穿越軌跡。如果將這兩個(gè)軌道放在一起,就可以確定通過縫隙的路徑了。
一旦無人機(jī)向縫隙前進(jìn),它會(huì)盡可能地保證它的攝像機(jī)瞄準(zhǔn)縫隙的邊緣,持續(xù)更新和它嘗試要鉆進(jìn)的空間的相關(guān)狀態(tài)估計(jì),并且盡可能地重新規(guī)劃軌跡。假設(shè)它順利通過了縫隙(成功率大概是80%),最后一步就是讓自己從瘋狂的速度和定位中恢復(fù)過來。
這樣的技能非常酷炫,但很難讓人不對(duì)機(jī)器人自行完成各種感應(yīng)和計(jì)算的重要性大肆渲染。當(dāng)然,想要將這些技能應(yīng)用到現(xiàn)實(shí)世界中,還是存在一些門檻的:這不僅僅是讓無人機(jī)穿過窗戶,更是教會(huì)它們?nèi)绾卧谌魏苇h(huán)境下(從熱帶雨林,到城市地貌,到你的臥室),可靠地快速通過各種障礙。
以下是IEEE采訪Scaramuzza教授的全紀(jì)錄。
1 2 下頁